
吴为(1990),男,硕士研究生,主要从事算法研究工作,wuwei0291@163.com;
0 引言
永磁同步电机因其效率高、体积小、功率密度大、转矩脉动小等特点而被广泛应用于交流伺服领域[1-3]。矢量控制在高性能的永磁同步伺服控制领域获得了广泛的应用,基于同步坐标系的同步比例积分(proportional integral,PI)控制器可以在较大的转速范围内实现电流指令的调节与跟踪,且稳态跟 踪性能好,因而成为了交流电机电流控制的工业标准[4-6]。
在同步旋转坐标系下,
为提高解耦效果,学者们提出了不同的方案:动态解耦策略可以实现
复矢量的概念是由Kovacs P K和Racz I在1959年首次提出,已广泛应用于电机系统分析,使用复矢量建模除了使模型简洁之外,还能揭示系统内部的电磁关系[16-17]。永磁同步电机的电流环模型是一种多输入多输出系统,而且耦合在一起,采用传统控制理论的方法很难分析,而复矢量是分析对称多输入多输出系统动态性能的一种有效方法[18]。复矢量电流控制器利用控制器的复零点对消控制系统的复极点,实现了零极点的完全对消,从本质上改善了电流的动态耦合现象。
本文以表贴式永磁同步电机作为研究对象,采用复矢量的方法对电机建模,引入一个随速度变化的虚轴零点,设计了复矢量解耦电流环控制器,并对比电压前馈解耦控制算法进行了仿真分析及实验验证。
1 电流控制器的设计
在伺服控制中,电流环是最内部的一环,电流环设计的好坏对于伺服系统的性能至关重要。
1.1 永磁同步电机的复矢量模型
对于表贴式的永磁同步电机,采用
\(\left\{ \begin{align} {{u}_{d}}=\frac{\text{d}{{\psi }_{d}}}{\text{d}t}-{{\omega }_{e}}{{\psi }_{q}}+R{{i}_{d}} \\ {{u}_{q}}=\frac{\text{d}{{\psi }_{q}}}{\text{d}t}+{{\omega }_{e}}{{\psi }_{d}}+R{{i}_{q}} \\\end{align} \right.\) (1)
\(\left\{ \begin{align} {{\psi }_{d}}={{L}_{d}}{{i}_{d}}+{{\psi }_{f}} \\ {{\psi }_{q}}={{L}_{q}}{{i}_{q}} \\\end{align} \right.\) (2)
其中
定义复矢量\({{\tilde{f}}_{dq}}={{f}_{d}}+\text{j}{{f}_{q}}\),则电压和电流复矢
量可以分别表示为:
\(\left\{ \begin{align} {{{\tilde{u}}}_{dq}}={{u}_{d}}+\text{j}{{u}_{q}} \\ {{{\tilde{i}}}_{dq}}={{i}_{d}}+\text{j}{{i}_{q}} \\\end{align} \right.\) (3)
对于表贴式的永磁同步电机
\({{\tilde{u}}_{dq}}={{R}_{s}}{{\tilde{i}}_{dq}}+{{L}_{s}}p{{\tilde{i}}_{dq}}+\text{j}{{\omega }_{e}}{{L}_{s}}{{\tilde{i}}_{dq}}+\text{j}{{\omega }_{e}}{{\psi }_{f}}\) (4)
其中\(p \)为微分算子;\({{\tilde{u}}_{dq}}\)和\({{\tilde{i}}_{dq}}\)分别为复矢量形式的
电压和电流。
将反电动势
\({{G}_{dq}}(s)=\frac{{{{\tilde{I}}}_{dq}}(s)}{{{{\tilde{U}}}_{dq}}(s)}=\frac{1}{{{L}_{s}}s+{{R}_{s}}+\text{j}{{\omega }_{e}}{{L}_{s}}}\) (5)
写成复矢量后,永磁同步电机数学模型由原来的多输入多输出系统变换成为等效的单输入单输出系统,其对应的电机模型框图如
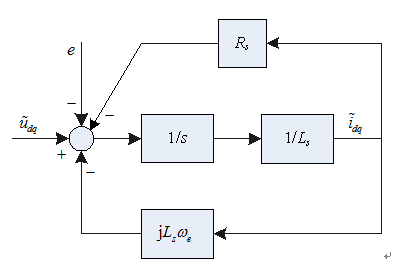 图1
复矢量电机模型
Fig. 1
Complex vector motor model
图1
复矢量电机模型
Fig. 1
Complex vector motor model
1.2 基于电压前馈解耦控制器的电流环结构
电流环采用传统的\({{K}_{p}}\times \Delta i+\int{({{K}_{i}}\times \Delta i)}\)结构
时,把电压前馈解耦控制的电流环结构改写成复矢量的形式,如
上图中,\(e \)和\( \hat{e}\)分别是反电动势项和估计的反电动势项;此外,在PI控制器的输出项上叠加了旋
转解耦项\(\text{j}{{\omega }_{e}}{{L}_{s}}{{\tilde{i}}_{dq}}\)和估计的反电动势项\(\hat{e}\)。
控制器的输出电压\(\Delta \tilde{u}_{dq}^{*}\)超出六边形边界,那么调制
之后的输出电压会停留在六边形边界处,因此,限幅后每个坐标轴上的电压是已经是相互解耦的,而且省去了积分限幅环节。
被控对象部分的模型如下:
\({{\tilde{u}}_{dq}}=({{L}_{s}}s+{{R}_{s}}){{\tilde{i}}_{dq}}+\text{j}{{\omega }_{e}}({{L}_{s}}{{\tilde{i}}_{dq}}+{{\psi }_{f}})\) (6)
控制器部分的模型如下:
\(\begin{align} \tilde{u}_{dq}^{*}=({{K}_{p}}+\frac{{{K}_{i}}}{s})(\tilde{i}_{dq}^{*}-{{{\tilde{i}}}_{dq}})-\frac{{{K}_{a}}{{K}_{i}}}{s}(\tilde{u}_{dq}^{*}-{{{\tilde{u}}}_{dq}})+ \\ \text{ j}{{\omega }_{e}}({{L}_{s}}{{{\tilde{i}}}_{dq}}+{{{\hat{\psi }}}_{f}}) \\\end{align}\) (7)
式(6)、(7)对减,消除反电动势项可得:
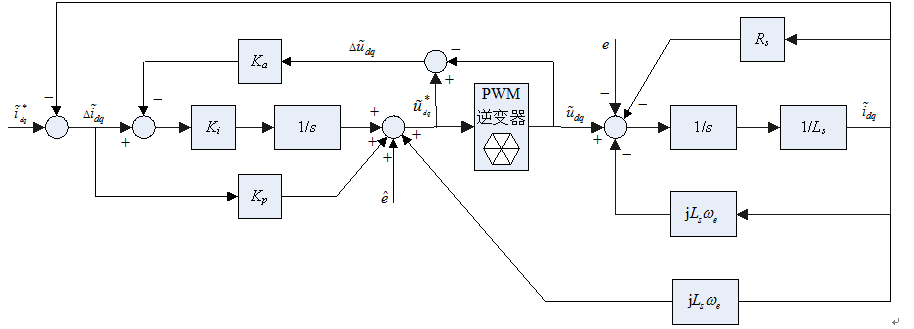 图2
电压前馈解耦控制模型
Fig. 2
Voltage feed forward decoupling control model
图2
电压前馈解耦控制模型
Fig. 2
Voltage feed forward decoupling control model
\(\begin{align} {{{\tilde{i}}}_{dq}}=\frac{{{K}_{p}}s+{{K}_{i}}}{{{L}_{s}}{{s}^{2}}+({{R}_{s}}+{{K}_{p}})s+{{K}_{i}}}\times \\ \ \ \ \ \ \ \ \{\tilde{i}_{dq}^{*}-\frac{s+{{K}_{a}}{{K}_{i}}}{{{K}_{p}}s+{{K}_{i}}}(u_{dq}^{*}-{{u}_{dq}})\} \\\end{align}\) (8)
从上式可知,取\({{K}_{a}}=1/{{K}_{p}}\)时,\((u_{dq}^{*}-{{u}_{dq}})\)前面
的系数可以对消一个零极点,式(8)可化为:
\({{\tilde{i}}_{dq}}=\frac{{{K}_{p}}s+{{K}_{i}}}{{{L}_{s}}{{s}^{2}}+({{R}_{s}}+{{K}_{p}})s+{{K}_{i}}}\times \{\tilde{i}_{dq}^{*}-\frac{1}{{{K}_{p}}}(u_{dq}^{*}-{{u}_{dq}})\}\) (9)
由式(5)可知,电流环被控对象的开环传递函数只存在一个复数极点,
采用
1.3 复矢量解耦控制器的设计
设计新的PI控制器,增加一个随速度变化的虚轴零点,让控制器的零点与被控对象的极点
被控对象部分的模型如下:
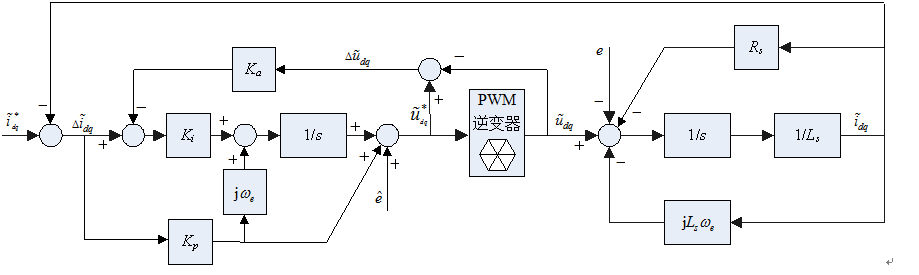 图3
复矢量解耦控制模型
Fig. 3
Complex vector decoupling control model
图3
复矢量解耦控制模型
Fig. 3
Complex vector decoupling control model
\({{\tilde{u}}_{dq}}=({{L}_{s}}s+{{R}_{s}}){{\tilde{i}}_{dq}}+\text{j}{{\omega }_{e}}({{L}_{s}}{{\tilde{i}}_{dq}}+{{\psi }_{f}})\) (10)
控制器部分的模型如下:
\(\begin{align} \tilde{u}_{dq}^{*}=({{K}_{p}}+\frac{{{K}_{i}}}{s})(\tilde{i}_{dq}^{*}-{{{\tilde{i}}}_{dq}})-\frac{{{K}_{a}}{{K}_{i}}}{s}(\tilde{u}_{dq}^{*}-{{{\tilde{u}}}_{dq}})+ \\ \ \ \ \ \ \ \ \ \text{j}\frac{{{K}_{p}}{{\omega }_{e}}}{s}(\tilde{i}_{dq}^{*}-{{{\tilde{i}}}_{dq}})+\text{j}{{\omega }_{e}}{{{\hat{\psi }}}_{f}} \\\end{align}\) (11)
式(10)、(11)对减,消除反电动势项可得:
\(\begin{align} {{{\tilde{i}}}_{dq}}=\frac{{{K}_{p}}s+{{K}_{i}}+\text{j}{{K}_{p}}{{\omega }_{e}}}{{{L}_{s}}{{s}^{2}}+({{R}_{s}}+{{K}_{p}}+\text{j}{{\omega }_{e}}{{L}_{s}})s+{{K}_{i}}+\text{j}{{K}_{p}}{{\omega }_{e}}}* \\ \ \ \ \ \ \ \ \ \{\tilde{i}_{dq}^{*}-\frac{s+{{K}_{a}}{{K}_{i}}}{{{K}_{p}}s+{{K}_{i}}+\text{j}{{K}_{p}}{{\omega }_{e}}}(u_{dq}^{*}-{{u}_{dq}})\} \\\end{align}\)(12)
从上式可知,取\({{K}_{a}}=1\text{/}{{K}_{p}}+\text{j}{{\omega }_{e}}\text{/}{{K}_{i}}\)时,\((u_{dq}^{*}-{{u}_{dq}})\)
前面的系数可以对消一个零极点,式(12)可化为:
\(\begin{align} {{{\tilde{i}}}_{dq}}=\frac{{{K}_{p}}s+{{K}_{i}}+\text{j}{{K}_{p}}{{\omega }_{e}}}{{{L}_{s}}{{s}^{2}}+({{R}_{s}}+{{K}_{p}}+\text{j}{{\omega }_{e}}{{L}_{s}})s+{{K}_{i}}+\text{j}{{K}_{p}}{{\omega }_{e}}}\times \\ \ \ \ \ \ \ \ \{\tilde{i}_{dq}^{*}-(u_{dq}^{*}-{{u}_{dq}})/{{K}_{p}}\} \\\end{align}\)(13)
对比式(9)和(13)式可见,传递函数的零点由-
\({{\tilde{i}}_{dq}}=\frac{{{K}_{p}}}{{{L}_{s}}s+{{K}_{p}}}\times \{\tilde{i}_{dq}^{*}-\frac{1}{{{K}_{p}}}(u_{dq}^{*}-{{u}_{dq}})\}\) (14)
这样就在全速度范围内抵消了旋转坐标变换
过程中产生的耦合项\(\text{j}{{\omega }_{e}}{{L}_{s}}{{\tilde{i}}_{dq}}\)。
1.4 复矢量解耦控制器的具体实现
要实现这种复矢量解耦控制器,只需要把
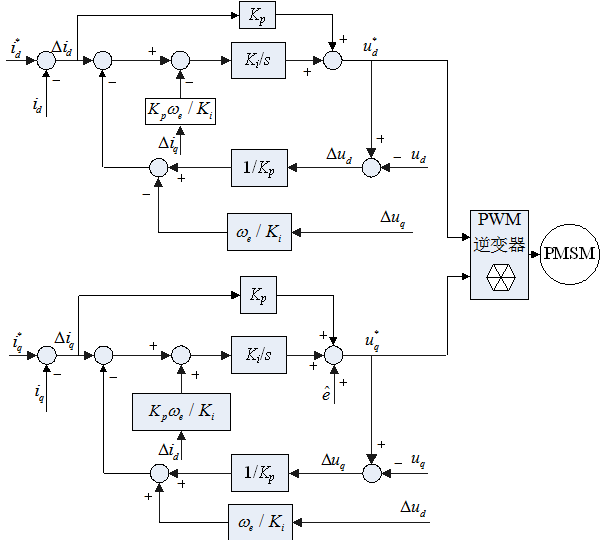 图4
可实现的
图4
可实现的
2 仿真验证
本文采用Matlab/Simulink 来搭建系统模型并验证复矢量解耦控制器对永磁同步电机的控制效果,仿真模型如
为了对比电压前馈解耦电流环控制器和复矢量解耦电流环控制器的控制效果,进行如下的仿真实验。
仿真中永磁同步电机的参数如
给电机施加一个0.5N•m的负载转矩启动,当给定的
从仿真结果可以看出,与电压前馈解耦电流环控制器相比,复矢量解耦的电流环控制器可以达到更好的控制效果,它响应速度更快,且无超调。
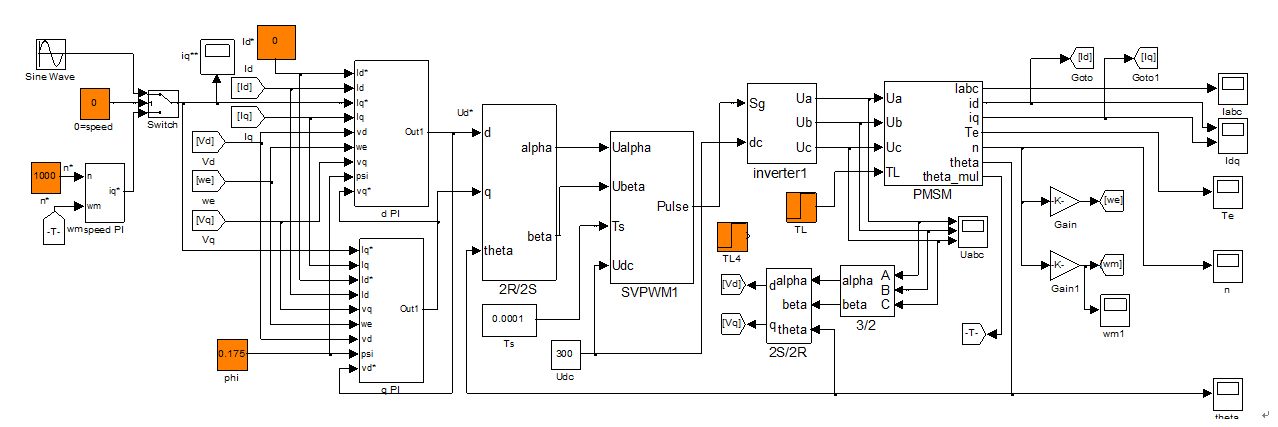 图5
基于复矢量解耦控制器的永磁同步电机仿真模型
Fig. 5
Simulation model of PMSM based on complex vector decoupling controller
图5
基于复矢量解耦控制器的永磁同步电机仿真模型
Fig. 5
Simulation model of PMSM based on complex vector decoupling controller
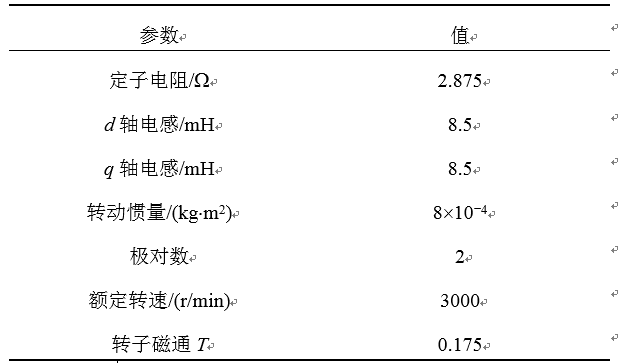 表1
永磁同步电机仿真参数
Tab. 1
Simulation parameters of PMSM
表1
永磁同步电机仿真参数
Tab. 1
Simulation parameters of PMSM
3 实验验证
3.1 实验平台简介
本文搭建了相应的实验平台来验证复矢量解耦电流环控制器对永磁同步电机的控制效果,用空载实验平台来验证控制器的稳速控制精度和正弦电流跟踪性能,用负载实验平台验证转矩突变时的电流跟踪性能。
空载实验平台采用新时达750W的伺服驱动器来控制一台松下A6永磁同步电机(电机型号是MHMF082,搭配23位的松下绝对式编码器),实验
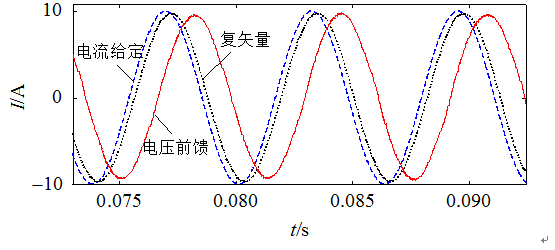 图6
正弦电流跟踪仿真效果
Fig. 6
Simulation results of sinusoidal current tracking
图6
正弦电流跟踪仿真效果
Fig. 6
Simulation results of sinusoidal current tracking
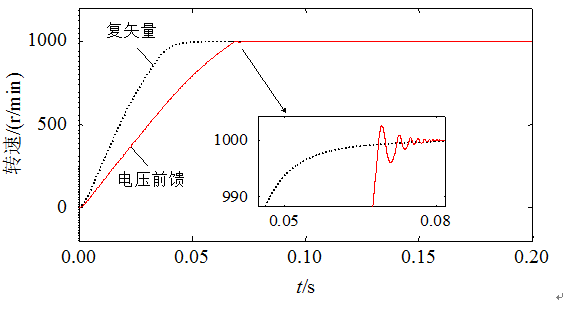 图7
阶跃转速仿真效果
Fig. 7
Simulation results of step speed
图7
阶跃转速仿真效果
Fig. 7
Simulation results of step speed
平台如
 图8
空载实验平台
Fig. 8
No-load test platform
图8
空载实验平台
Fig. 8
No-load test platform
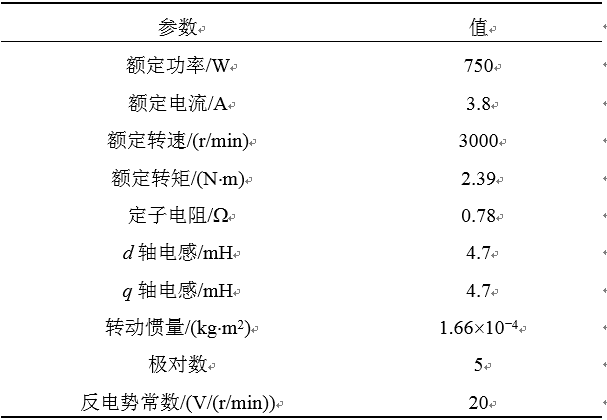 表2
空载实验平台-松下A6电机参数
Tab. 2
No-load test platform-A6 motor parameters
表2
空载实验平台-松下A6电机参数
Tab. 2
No-load test platform-A6 motor parameters
负载实验平台采用新时达的3W的伺服驱动器来控制一台翡叶动力的永磁同步电机(电机型号是5FSNA74-220,搭配17位的多摩川绝对式编码器),电机同轴连接一个MAGTROL品牌的磁滞测功机,型号是HD-825-8NA,测功机最高可以施加56Nm的负载转矩,用于模拟实际情况下的负载情况,实验平台如
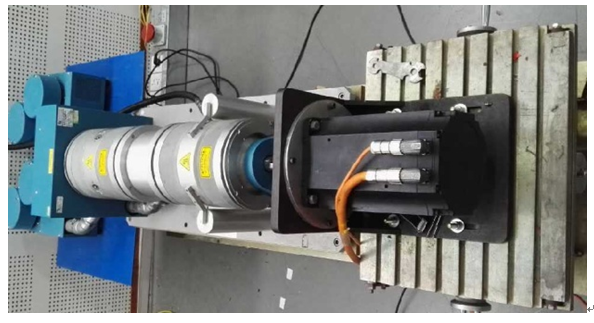 图9
负载实验平台
Fig. 9
Load experimental platform
图9
负载实验平台
Fig. 9
Load experimental platform
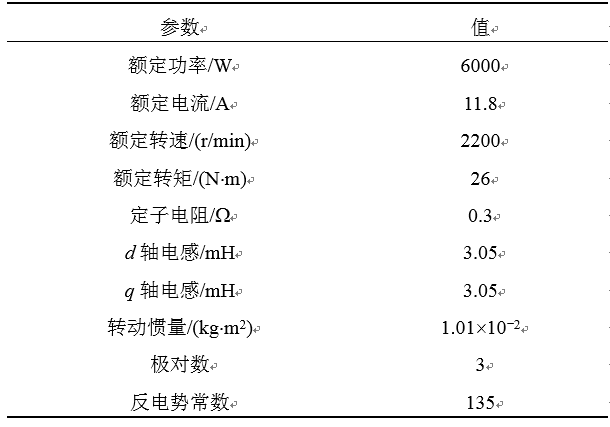 表3
负载实验平台-翡叶动力电机参数
Tab. 3
Load experimental platform -FinePower motor parameters
表3
负载实验平台-翡叶动力电机参数
Tab. 3
Load experimental platform -FinePower motor parameters
实验时,用新时达的上位机软件STEP Monitor采集波形,界面如下
在以下实验波形中,纵坐标中的1代表额定值,如速度为0.5则代
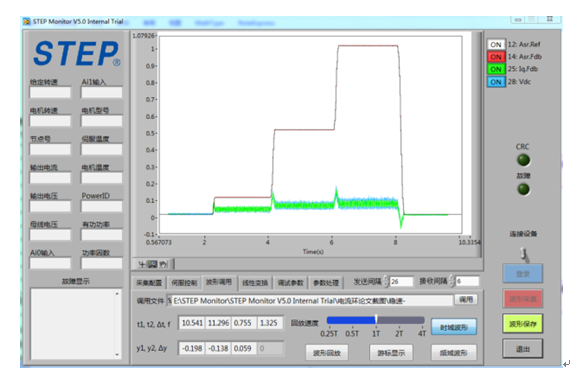 图10
上位机软件
Fig. 10
PC software
图10
上位机软件
Fig. 10
PC software
3.2 空载实验-稳速
把电流环PI期望带宽设为1500Hz,速度环采用同样的控制参数,在空载实验平台上,让电机空载运行在速度模式下,分别设定目标转速为10%、50%、100%的额定转速,用新时达的上位机软件采集速度给定和反馈、电流给定和反馈,采样间隔是100μs。
实验得到采用电压前馈解耦电流环控制器和复矢量解耦电流环控制器的波形分别如
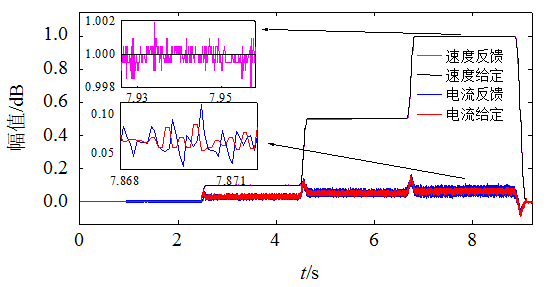 图11
稳速实验-电压前馈解耦电流环控制器
Fig. 11
Steady speed experiment -Voltage feed forward decoupling current controller
图11
稳速实验-电压前馈解耦电流环控制器
Fig. 11
Steady speed experiment -Voltage feed forward decoupling current controller
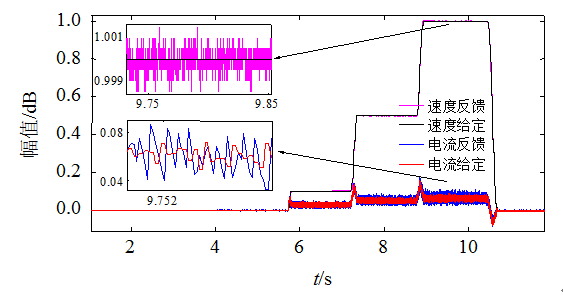 图12
稳速实验-复矢量电流环控制器
Fig. 12
Steady speed experiment Complex vector based current controller
图12
稳速实验-复矢量电流环控制器
Fig. 12
Steady speed experiment Complex vector based current controller
3.3 空载实验-正弦跟踪
在空载实验平台上,让电机空载运行在转矩模式,设定转矩指令是一个幅值固定为10%的额定转矩、频率固定为1500Hz的正弦波,用新时达的上位机软件采集电流给定和反馈,采样间隔是50μs。
把PI的期望带宽分别设为1000、1500、2000Hz,实验得到采用电压前馈解耦电流环控制器和复矢量解耦电流环控制器时的电流跟踪波形如
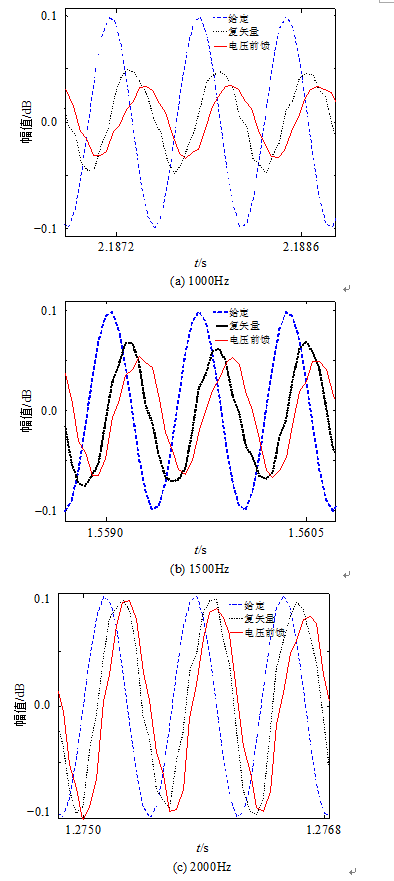 图13
正弦跟踪实验
Fig. 13
Sinusoidal tracking experiment
图13
正弦跟踪实验
Fig. 13
Sinusoidal tracking experiment
 表4
正弦跟踪实验数据
Tab. 4
Sinusoidal tracking experiment data
表4
正弦跟踪实验数据
Tab. 4
Sinusoidal tracking experiment data
发现,采用复矢量电流控制器时,可以有效增强瞬态电流跟踪控制能力;从电流跟踪的相位来看,采用复矢量控制器时,跟踪的延迟更小。
3.4 负载实验-负载转矩突变
把电流环PI控制器的期望带宽设为1500Hz,速度环采用同样的控制参数,在负载实验平台上,先让电机空载运行在转速模式,目标转速设为10%的额定转速,然后给电机突加一个20Nm的负载转矩,用新时达的上位机软件采集速度给定和反馈、电流给定和反馈,采样间隔是100μs。
把实验得到采用电压前馈解耦电流环控制器和复矢量解耦电流环控制器的波形分别如
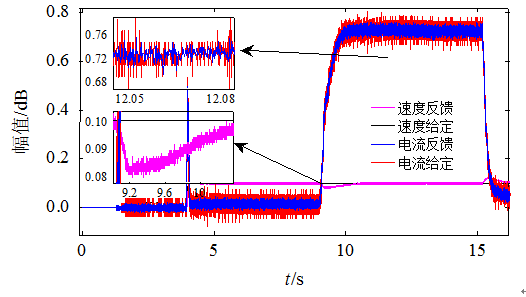 图14
负载实验-电压前馈解耦电流环控制器
Fig. 14
Load experiment-Voltage feed forward decoupling current controller
图14
负载实验-电压前馈解耦电流环控制器
Fig. 14
Load experiment-Voltage feed forward decoupling current controller
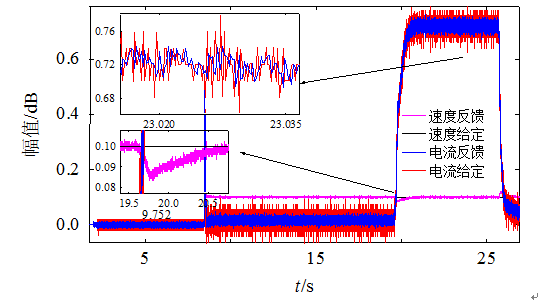 图15
负载实验-复矢量电流环控制器
Fig. 15
Load experiment-Complex vector based current controller
图15
负载实验-复矢量电流环控制器
Fig. 15
Load experiment-Complex vector based current controller
4 结论
本文首先利用复矢量分析对电机电流环进行了建模,根据可变的极点设计一个随速度变化的零点,从而实现全速度范围内的电流环解耦;本文搭建了复矢量解耦电流调节器,推导给出了控制器的核心参数;为验证效果,本文进行了仿真分析,并且在不同功率等级的电机平台上进行了实验验证。
仿真和实验结果表明:
1)与电压前馈解耦电流环控制器相比,复矢量解耦电流环控制器可以提高电流跟踪的速度,并减小电流跟踪的延迟。
2)采用复矢量电流环控制器时,可以减小稳速时的电流波动,而且电流稳态精度的提升并没有造成电流环跟踪的滞后。
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]