
0 引言
基于特高频(ultra-high frequency, UHF)阵列的局部放电(partial discharge, PD)波达方向(direction of arrival, DOA)估计近年来受到了国内外学者广泛的研究[1-2];该方法最大的优点在于抗干扰能力强,特别适用于现场检测。
现阶段相关研究中,传统的特高频阵列大多为2×2阵列[3-5]。2×2阵列阵元数较少,定向分辨度较低,能定向的局部放电源数量较少。现阶段研究主要采用2×2阵列的原因在于,该阵列能够支持特高频信号同步采样的GHz高速采集系统多为4通道。另一种高频信号采样方法是考虑到超外差接收机可以利用本地产生的振荡波与输入信号混频,将GHz高频待测量窄带信号频率降低到某个预先确定的频率进行采样,从而降低采样频率;然而由于局部放电信号为宽带信号,因此该方法并不适用。本文设想如果能将传统阵列扩展为3×3阵列、甚至4×4阵列进行定向,那么阵元数量会增加,阵列的分辨能力也会提高,这样不仅可以提高定向精度,还可以增加局部放电源的定向数量。
阵列的虚拟扩展技术可以增加阵列阵元数量,提高阵列的孔径及方向分辨能力。基于4阶累积量的阵列虚拟扩展在超声阵列中已有较为成功的应用[6-7]。
本文在已有研究的基础上,提出一种基于压缩感知(compressive sensing, CS)原理[8-9]的特高频阵列虚拟扩展方法。该方法在信号重构的基础上[10],将传统的2×2特高频阵列虚拟扩展为N×N(N>2)阵列,不仅提升了局部放电信号的空间谱(spatial spectrum)精度[11-13],同时还能对多个信号源进行定向测量[14]。通过仿真及实验,对本方法的可行性和工程实用价值进行了验证。研究结果可为电力设备的局部放电检测提供参考。
1 压缩感知原理及扩展阵列的构造
1.1 压缩感知原理
压缩感知原理的应用分为3个步骤,即信号的稀疏表示、测量矩阵的选取及信号的重构。
设复信号x=[x1, x2,…, x4]可用一规范正交基矩阵\(\Psi ={{\left[ {{\psi }_{1}},{{\psi }_{2}},\cdots ,{{\psi }_{U}} \right]}^{\text{T}}}\)的线性组合来表示,即
\(x=\sum\limits_{i=1}^{U}{{{a}_{i}}{{\psi }_{i}}=\mathbf{\Psi }a}\) (1)
式中:\(a={{[{{a}_{1}},{{a}_{2}},\cdots ,{{a}_{U}}]}^{\text{T}}}\)为系数矩阵;U为采样维数;Ψ为U×U维的基变换矩阵。若\({{\left\| a \right\|}_{0}}=C\)且C<<U,则称x为C-稀疏信号,即信号可稀疏表示。
在上述前提下,将信号x进行投影变换得到
\(y=\mathbf{\Phi x}=\mathbf{\Phi \Psi a}\dot{=}\mathbf{\Theta a}\) (2)
式中:Φ为Q×U维测量矩阵;\(\mathbf{\Theta }=\mathbf{\Phi \Psi }\)为传感矩阵;y为Q×1维矢量;a为\(U\times 1\)维矢量,且Q<<U。
测量矩阵Φ常常选取随机高斯矩阵,随机高斯矩阵和任意固定的稀疏基矩阵Ψ都有很大概率使得\(\mathbf{\Theta }\)满足约束等距性(restricted isometry property, RIP)[8,15]条件。
理论证明,当\(\mathbf{\Theta }\)满足RIP条件时,高维信息矢量a可由低维观测矢量y通过求解l1范数问题精确重构,即信号重构可由式(3)得出
\(\min {{\left\| a \right\|}_{1}}\text{ }s.t.\text{ }y=\mathbf{\Theta a}\) (3)
1.2 特高频阵列信号接收模型
设特高频阵列由M×M个阵元组成二维平面阵列,M为传感器个数;传感器阵列一边均匀分布在x轴上,记为阵列1;另一边均匀分布在y轴上,记为阵列2;2个阵列分别用于测量信号源的方位角θ与俯仰角ϕ,如
设有K个相互间独立的窄带信号被阵列接收,P表示局放点,r为其到坐标原点距离。阵列1和阵列2观测所得的信号矢量分别表示为y1(t)、y2(t);噪声矢量分别表示为v1(t)、v2(t);信源信号矢量为s(t)。则阵列1和阵列2中观测到的信号可分别表示为[16-17]:
\({{\mathbf{y}}_{1}}\text{(}t\text{)}\mathbf{=}{{\mathbf{A}}_{\text{1}}}\text{(}\theta \mathbf{,}\phi \text{)}\cdot \mathbf{s}\text{(}t\text{)}\mathbf{+}{{\mathbf{v}}_{\text{1}}}\text{(}t)\) (4)
\({{\mathbf{y}}_{2}}\text{(}t\text{)}\mathbf{=}{{\mathbf{A}}_{2}}\text{(}\theta \mathbf{,}\phi \text{)}\cdot \mathbf{s}\text{(}t\text{)}\mathbf{+}{{\mathbf{v}}_{2}}\text{(}t)\) (5)
式中:y1(t)与y2(t)均为M×1维数据矢量,表示接收的信号向量;s(t)=[s1(t), s2(t), …, sK(t)]T为K×1维空间入射信号矢量;v1(t)与v2(t)为M×1维数据噪声矢量;A1(θ, ϕ)与A2(θ, ϕ)为M×K维阵列的导向矢量矩
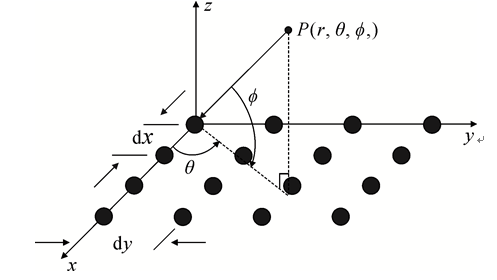 图1
特高频传感器阵列模型
Fig.1
Model of UHF sensor array
图1
特高频传感器阵列模型
Fig.1
Model of UHF sensor array
阵,可写为:
\({{A}_{1}}(\theta ,\phi )=[{{a}_{1}}({{\theta }_{1}},{{\phi }_{1}}),{{a}_{1}}({{\theta }_{2}},{{\phi }_{2}}),\cdots ,{{a}_{1}}({{\theta }_{K}},{{\phi }_{K}})]\) (6)
\({{A}_{2}}(\theta ,\phi )=[{{a}_{2}}({{\theta }_{1}},{{\phi }_{1}}),{{a}_{2}}({{\theta }_{2}},{{\phi }_{2}}),\cdots ,{{a}_{2}}({{\theta }_{K}},{{\phi }_{K}})]\) (7)
式中导向矢量为:
\({{a}_{1}}({{\theta }_{i}},{{\phi }_{i}})={{[1,\exp ({{\psi }_{1}}),\cdots ,\exp ((M-1){{\psi }_{1}})]}^{\text{T}}}\) (8)
\({{a}_{2}}({{\theta }_{i}},{{\phi }_{i}})={{[1,\exp ({{\psi }_{2}}),\cdots ,\exp ((M-1){{\psi }_{2}})]}^{\text{T}}}\) (9)
式中:i=1, 2, …, K;\({{\psi }_{1}}=-(2\text{ }\!\!\pi\!\!\text{ }/\lambda ){{d}_{x}}\sin {{\theta }_{i}}\cos {{\phi }_{i}}\);\({{\psi }_{2}}=-(2\text{ }\!\!\pi\!\!\text{ }/\lambda ){{d}_{y}}\sin {{\theta }_{i}}\sin {{\phi }_{i}}\)。
本文的基本思想是通过求信号方程组(4)和(5),得出信号源相对阵列的方位角及俯仰角。
1.3 导向矢量矩阵及信号源向量扩展
应用压缩感知原理进行阵列虚拟扩展,首先需要对导向矢量矩阵及信号源向量扩展。
类似地,由于平面被等分为X个空间角度,式(6)、式(7)所示扩展前的导向矢量矩阵需进行扩展,记阵列1、阵列2扩展后的矩阵为超完备字典分别为G1(θ, ϕ)、G2(θ, ϕ),则有:
\({{G}_{1}}(\theta ,\phi )=[{{a}_{1}}({{\theta }_{1}},{{\phi }_{1}}),{{a}_{1}}({{\theta }_{2}},{{\phi }_{2}}),\cdots ,{{a}_{1}}({{\theta }_{X}},{{\phi }_{X}})]\) (10)
\({{G}_{2}}(\theta ,\phi )=[{{a}_{2}}({{\theta }_{1}},{{\phi }_{1}}),{{a}_{2}}({{\theta }_{2}},{{\phi }_{2}}),\cdots ,{{a}_{2}}({{\theta }_{X}},{{\phi }_{X}})]\) (11)
其中X>>K且X>>M。
至此,式(4)、式(5)所代表的多源信号空间谱估计问题可转化为下列问题:
\({{y}_{1}}'(t)={{G}_{1}}(\theta ,\phi )\cdot {{h}_{1}}(t)+{{v}_{1}}(t)\) (12)
\({{y}_{2}}'(t)={{G}_{2}}(\theta ,\phi )\cdot {{h}_{2}}(t)+{{v}_{2}}(t)\) (13)
式中:h1(t)、h2(t)表示扩展后的信号矢量。
方程式的求解需要进一步完成测量矩阵的构造及信号的重构。
1.4 测量矩阵的构造
为保证压缩感知重构的信号能够正确表示原信号,测量矩阵与基变换矩阵Ψ需满足RIP条件,本文中的Ψ即为式(10)、式(11)所示的超完备字典。
Candes和Tao等证明独立同分布的高斯随机测量矩阵可以成为普适的压缩感知测量矩阵[8,18],本文中测量矩阵选用随机高斯矩阵。
 图2
测量空间划分示意图
Fig.2
Division diagram of measurement space
图2
测量空间划分示意图
Fig.2
Division diagram of measurement space
确定了信号的稀疏表示及测量矩阵后,观测矢量可写为:
\({{\mathbf{y}}_{1}}(t)=\mathbf{\Phi }{{\mathbf{G}}_{1}}(\theta ,\phi ){{\mathbf{h}}_{1}}(t)+\mathbf{\Phi }{{\mathbf{v}}_{1}}(t)=\mathbf{\Theta }{{\mathbf{h}}_{1}}(t)+{{\mathbf{n}}_{1}}(t)\) (14)
\({{\mathbf{y}}_{2}}(t)=\mathbf{\Phi }{{\mathbf{G}}_{2}}(\theta ,\phi ){{\mathbf{h}}_{2}}(t)+\mathbf{\Phi }{{\mathbf{v}}_{2}}(t)=\mathbf{\Theta }{{\mathbf{h}}_{2}}(t)+{{\mathbf{n}}_{2}}(t)\) (15)
式中:n1(t)=\(\mathbf{\Phi }{{\mathbf{v}}_{1}}(t)\);n2(t)=\(\mathbf{\Phi }{{\mathbf{v}}_{2}}(t)\)。
1.5 局部放电信号重构
信号重构算法指通过维数为M的阵列终端信号y1(t)、y2(t)重构出维数为N的系数信号h1(t)、h2(t),系数信号乘对应的扩展后导向矢量即可获得扩展后的信号y1′(t)和y2′(t)。
本文选择多测量矢量欠定系统正则化聚焦求解(regularization focal underdetermined system solver to multiple measurement vectors, RM-FOCUSS)算法[19],既能保证角度估计的精度,又能降低运算量。
式(14)、式(15)可以通过如下方法进行求解
\(\begin{align} \min {{\left\| \mathbf{y}-\mathbf{\Theta h} \right\|}_{2}}\text{+}\lambda {{J}^{p}}\text{(}\mathbf{h}\text{) } \\ s.t.\text{ }{{J}^{p}}\text{(}\mathbf{h}\text{)}=\sum\limits_{q=1}^{K}{{{(\left| \mathbf{h}(q) \right|)}^{p}}},\lambda \ge 0,p\in [0,1] \\\end{align}\) (16)
式中:Jp(h)为上述最优化问题差异性测量表示;λ表示稀疏性参数;p为指数阶数。
2 宽带信号聚焦处理及噪声抑制
2.1 局部放电宽带信号聚焦处理
利用空间谱估计进行定向时,入射信号必须是窄带信号,而局部放电特高频信号却是宽带信号。解决该问题的方法是对宽带信号进行聚焦处理,利用聚焦矩阵,记为T(fj),将包含不同频率(频率记为fj)的导向矢量矩阵A(fj)变换到同一中心频率上。其中,j=1, 2,…,F,F为频率数。宽带信号的聚焦处理可以保留原始信号丰富的空域信息,使得DOA估计精度不受影响。
本文中,利用一致聚焦变换算法(consistent focusing, CF)[20]进行聚焦,该方法通过无噪声数据之间的关系来选取聚焦矩阵T(fj),CF算法中聚焦矩阵满足
\(\underset{T({{f}_{j}})}{\mathop{\min }}\,{{\left\| \mathbf{R}({{f}_{0}})-T({{f}_{j}}){{T}^{\text{H}}}({{f}_{j}}) \right\|}_{\text{F}}}\text{ }\) (17)
式中:f0为聚焦后中心频率;\({{\left\| \cdot \right\|}_{\text{F}}}\)为Frobenius模;R(f0)为聚焦后信号A(f0)·s(f0)的协方差矩阵。
2.2 宽带聚焦误差分析
根据2.1节的聚焦原理,结合式(4)、式(5)可知,聚焦后的信号为
\(T({{f}_{j}})y({{f}_{j}})=T({{f}_{j}})A({{f}_{j}},\theta ,\phi )s({{f}_{j}})+T({{f}_{j}})v({{f}_{j}})\) (18)
其协方差矩阵可写为
\(R=A({{f}_{0}},\theta ,\phi )\overline{{{R}_{s}}}{{A}^{\text{H}}}({{f}_{0}},\theta ,\phi )+\overline{{{R}_{n}}}\) (19)
式中\(\overline{{{R}_{n}}}\)为噪声子空间的协方差矩阵,且有
\(\overline{{{R}_{n}}}=\sum\limits_{j=1}^{J}{T({{f}_{j}}){{R}_{n}}({{f}_{j}}){{T}^{\text{H}}}({{f}_{j}})}\) (20)
本文利用式(26)所示的多重信号分类(multiple signal classification, MUSIC)算法进行定向,该算法利用噪声子空间协方差矩阵与导向矢量构建空间谱,其噪声子空间的协方差矩阵如式(20)所示。在宽带聚焦过程中,该协方差矩阵只与聚焦矩阵作用,不会产生相位偏移误差,因此宽带聚焦对MUSIC算法的定向精度影响较小。
2.3 基于压缩感知的噪声抑制
根据式(14)、式(15)可知,观测信号y(t)中不仅有待重构的高维稀疏信号h(t),还包括环境噪声v(t)。建立观测信号的协方差矩阵时,考虑到各阵元噪声相互独立,则有
$\begin{align} R=\mathbf{E}\{y\cdot {{y}^{\text{H}}}\}=\sum\limits_{i=1}^{K}{{{\lambda }_{i}}{{e}_{i}}}e_{i}^{\text{H}}+\sum\limits_{j=K+1}^{M}{{{\lambda }_{j}}{{e}_{j}}}e_{j}^{\text{H}}\text{=} \\ {{U}_{\text{S}}}{{D}_{\text{S}}}U_{\text{S}}^{\text{H}}+{{U}_{\text{N}}}{{D}_{\text{N}}}U_{\text{N}}^{\text{H}}\end{align}$ (21)
式中:λi、US和DS分别表示信号特征值、子空间和特征值矩阵;λj、UN和DN分别表示噪声特征值、子空间和特征值矩阵;ei、ej表示特征向量。
构造的一线性降噪矩阵满足
\(O=I-{{U}_{\text{N}}}U_{\text{N}}^{\dagger }\) (22)
式中:$U_{\text{N}}^{\dagger }$表示UN的伪逆阵,\(U_{\text{N}}^{\dagger }={{(U_{\text{N}}^{*}{{U}_{\text{N}}})}^{-1}}U_{\text{N}}^{*}\);I表示单位阵。因此,对于任意P阶噪声信号v(t),对式(14)、式(15)左乘降噪矩阵O,对于噪声向量有
\(O\cdot \Phi v=O{{U}_{\text{N}}}v=(I-{{U}_{\text{N}}}{{(U_{\text{N}}^{*}{{U}_{\text{N}}})}^{-1}}U_{\text{N}}^{*}){{U}_{\text{N}}}v\text{=}{{U}_{\text{N}}}v-{{U}_{\text{N}}}v=0\) (23)
通过式(23)中降噪矩阵O的构造,测量矩阵左乘矩阵O,应用新构造的降噪测量矩阵OΦ进行信号重构,从而降低环境噪声对定位的影响。
3 扩展阵列局部放电定向仿真
3.1 仿真条件及步骤
为验证本文提出的定向方法的可行性,首先基于Matlab进行扩展阵列的局部放电定向仿真,仿真的实现步骤如下。
3.1.1 仿真参数的确定
实际阵元数设为2,扩展阵元数为N(N=3,4),采样频率为5 GHz,采样快拍数为1 024,局部放电信号中心频率设为800 MHz,带宽为20 MHz,波速3×108 m/s,信号如
3.1.2 构造局部放电源
依照式(4)、式(5)构造局部放电信号y(t),信号源1的方位角、俯仰角分别为0°和20°,信号源2的方位角、俯仰角分别为30°和30°。其导向矢量矩阵的构造如式(6)—式(9)所示。
3.1.3 阵列扩展及降噪测量矩阵构造
对原始矩阵导向矢量矩阵A(θ, ϕ)按照式(10)、式(11)所示扩展为超完备导向矢量矩阵G(θ, ϕ),作为压缩感知基变换矩阵Ψ;构造随机高斯矩阵,并左乘式(23)所示的噪声抑制矩阵,作为测量矩阵Φ。
3.1.4 信号聚焦与局部放电信号重构
依照式17利用CF聚焦算法对局部放电信号y(t)进行聚焦处理。应用式(16)的RM-FOCUSS算法,重构出式(14)、式(15)中的高维信号矢量h(t);超完备导向矢量矩阵乘以高维信号矢量h(t)即可得出扩展矩阵接收的局部放电信号y′(t)。
3.1.5 空间谱构造
按照式(24)对应的谱估计式进行谱峰搜索[21],极大点对应的(θ, ϕ)即为局部放电信号的波达方向
$P(\theta ,\phi )=\frac{1}{{{a}^{\text{H}}}(\theta ,\phi ){{\mathbf{U}}_{\text{N}}}\mathbf{U}_{\text{N}}^{\text{H}}a(\theta ,\phi )}$ (24)
式中:P(θ, ϕ)表示空间谱;a(θ, ϕ))为超完备导向矢量;UN为扩展后的信号y′(t)的噪声特征矢量组成的噪声子空间。
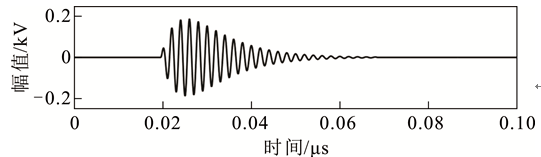 图3
特高频局部放电仿真信号
Fig.3
Simulated UHF partial discharge signal
图3
特高频局部放电仿真信号
Fig.3
Simulated UHF partial discharge signal
3.2 仿真结果分析
利用原始2×2阵列对信号源1进行定位,随后对信号源2进行定位。再利用扩展的3×3阵列对2个信号源同时定位,其空间谱分布结果如
分析
定向精度提升的原因在于阵元数量的增加,仿真实验中不同阵列的方向图如
 图4
扩展阵列3×3的特高频双信号源空间谱定位
Fig.4
Spatial spectrum localization of UHF double signal sources by extended 3×3 sensor array
图4
扩展阵列3×3的特高频双信号源空间谱定位
Fig.4
Spatial spectrum localization of UHF double signal sources by extended 3×3 sensor array
 图5
扩展阵列4×4的特高频三信号源空间谱定位
Fig.5
Spatial spectrum localization of UHF three signal sources by extended 4×4 sensor array
图5
扩展阵列4×4的特高频三信号源空间谱定位
Fig.5
Spatial spectrum localization of UHF three signal sources by extended 4×4 sensor array
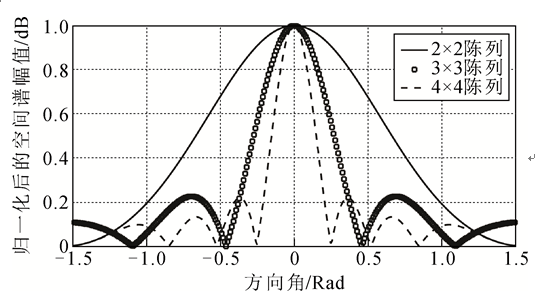 图6
阵列方向图与阵元个数的关系图
Fig.6
Relationship between the array pattern and the number of sensors
图6
阵列方向图与阵元个数的关系图
Fig.6
Relationship between the array pattern and the number of sensors
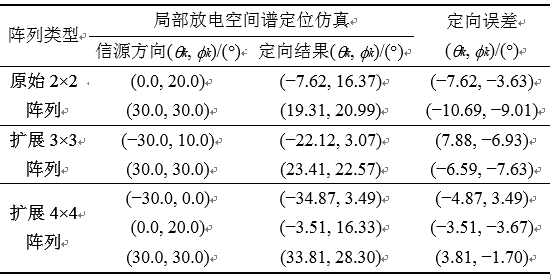 表1
仿真定位结果
Table
1 DOA estimation results of simulation tests
表1
仿真定位结果
Table
1 DOA estimation results of simulation tests
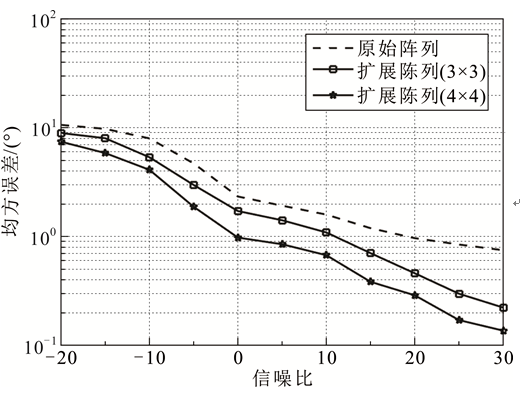 图7
局部放电定向误差与阵列类型关系
Fig.7
Relationship between DOA estimation error and the array pattern
图7
局部放电定向误差与阵列类型关系
Fig.7
Relationship between DOA estimation error and the array pattern
调整仿真信号信噪比并重新进行实验,获得局部放电定向均方误差与信噪比关系如
4 实验室验证
4.1 实验测试条件
为了进一步测试该方法的性能,在实验室环境下搭建了特高频局部放电定向系统,该系统由特高频阵列、预处理单元、多通道高速同步采集系统及电脑4部分组成,如
传感器阵列采用宽带全向特高频天线,其频率检测范围为300 MHz~1.5 GHz;特高频信号放大器的频率检测范围为300 MHz~1.5 GHz,且增益≥20 dB。在实验室环境中进行多源局部放电定向实验,径向距离设置为3 m,分别在不同方位角、俯仰角的坐标处利用手持式静电枪进行放电,模拟局部放电源。放电点的位置示意图如
4.2 实验测试步骤
实际实验测试的步骤与3.1节所示的仿真步骤类似,具体步骤如下。
1)利用设备记录局部放电信号,典型时域信号如
2)依照1.3节
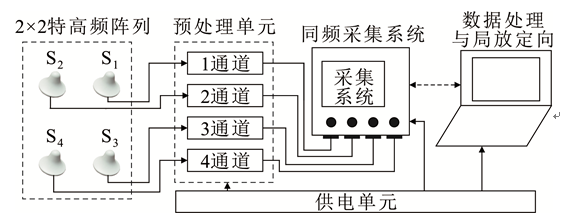 图8
基于压缩感知的特高频多源局放定向系统
Fig.8
Multiple UHF PD sources DOA estimation system based on compressive sensing
图8
基于压缩感知的特高频多源局放定向系统
Fig.8
Multiple UHF PD sources DOA estimation system based on compressive sensing
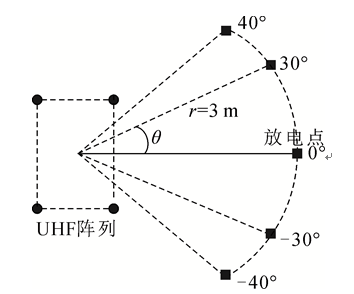 图9
实验中放电点的位置示意图
Fig.9
Sketch of discharge points positions in experiments
图9
实验中放电点的位置示意图
Fig.9
Sketch of discharge points positions in experiments
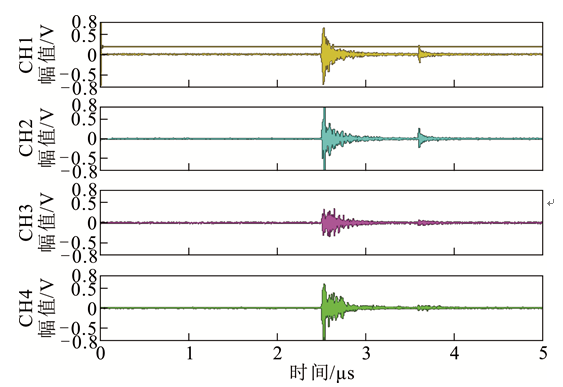 图10
定向系统接收的2源4路特高频局部放电信号
Fig.10
Two-source and four-channel UHF PD signals received by the DOA estimation system
图10
定向系统接收的2源4路特高频局部放电信号
Fig.10
Two-source and four-channel UHF PD signals received by the DOA estimation system
列扩展为3×3和4×4阵列。
3)后续实验步骤包括测量矩阵构建、信号聚焦重构、空间谱构建等,与仿真实验相同,可参照3.1.3节至3.1.5节的相关内容。
扩展4×4阵列检测到了2个局部放电信号,如
4.3 结果对比分析
为了进行性能对比,重复进行实验测试。首先
利用原始阵列对单个局部放电源进行空间谱定位,随后利用扩展的3×3阵列及扩展的4×4阵列,分别对2个局部放电源及3个局部放电源进行定向,得到实验结果如
分析实验数据可知,利用原始阵列空间谱估计方法对单个局部放电源定向,其定向结果误差较大,约为15°。且该方法只能对单个局部放电源进行定向,应用前景较窄,与其他方法相比并无优势。
分析
对比分析
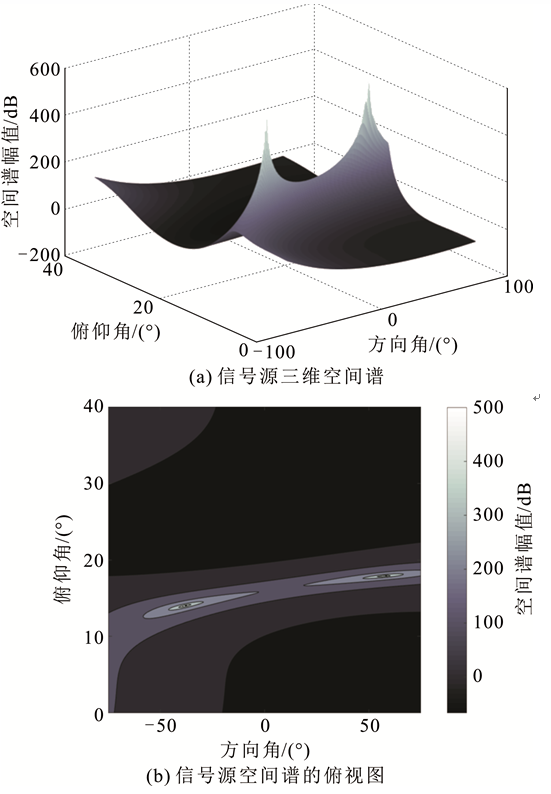 图11
实际信号的定向结果
Fig.11
DOA estimation results of actual UHF signals
图11
实际信号的定向结果
Fig.11
DOA estimation results of actual UHF signals
的正交性进行定向,当把高斯白噪声作为噪声信号时,其正交性明显,定向效果较好且精度较高;而对于复杂的实际噪声信号,正交性相对较差,定向误差也更大。
本文应用的基于MUSIC算法的空间谱功率与阵列类型关系如
5 结论
1)论文基于压缩感知原理对局部放电定向特高频阵列进行虚拟扩展,将传统的2×2特高频阵列扩展为N×N (N>2)阵列。扩展阵列构建了局部放电信号空间谱,根据空间谱特征分布实现了对多局部放电源的准确定向。
2)阵列扩展的原理是以信号导向矢量矩阵作为基变换矩阵,以随机高斯矩阵作为测量矩阵,通过RM-FOCUSS信号重构算法实现了阵列虚拟扩
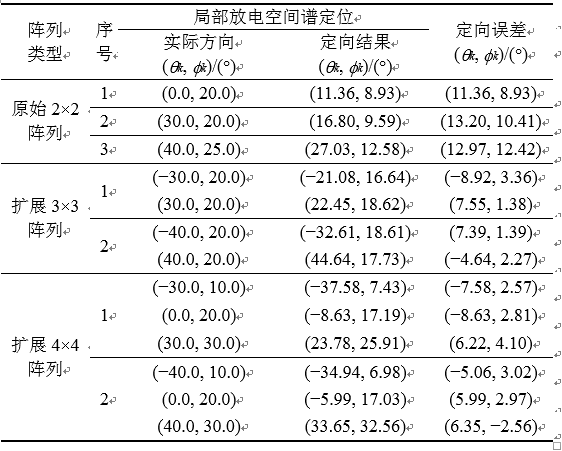 表2
实际实验定向结果
Table
2 DOA estimation results of experimental tests
表2
实际实验定向结果
Table
2 DOA estimation results of experimental tests
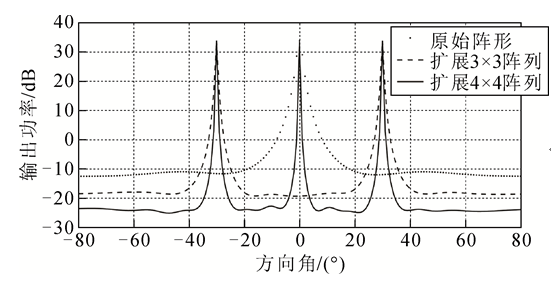 图12
输出功率与阵列类型关系图
Fig.12
Relationship between output power and array types
图12
输出功率与阵列类型关系图
Fig.12
Relationship between output power and array types
展。在局部放电信号宽带聚焦和构造降噪矩阵抑制环境噪声的基础上,利用MUSIC算法构建了局部放电信号空间谱。
3)仿真结果表明,扩展4×4阵列的定向精度大幅提升,方位角误差由传统2×2阵列的约10°下降至约4°。实验室测试结果表明,以扩展(4×4)阵列为例,其方位角误差约为8°,俯仰角误差约为4°,局部放电定向数量从传统阵列的1个扩展到3个。
验证了所提方法的可行性和工程实用价值。
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]