



0 引言
随着风电渗透率的不断提高[1-3],风电机组的动态过程及其与电网的相互作用已引起了广泛的关
注[4-7]。风电机组与常规同步发电机相比,差异之一在于其原动机轴与发电机轴间存在一个用于变速传动的齿轮箱,因此其轴系的柔性远大于同步发电机,在风电机组的动态过程中可能引发轴系振荡[8]。随该振荡而产生的应力将严重影响风电机组齿轮箱等部件的寿命[9],如导致轴承接触面出现裂纹、划伤、凹坑等疲劳磨损现象,严重时甚至会导致轮齿的疲劳折断[10]。据称我国安装的双馈感应风电机组齿轮箱损坏率高达40%~50%,严重影响了风电机组的安全稳定运行[11]。并且,当风电机组接入电网后,其轴系振荡与电力系统固有的振荡模式将会相互影响。风电机组的轴系振荡可能作为扰动源激发电力系统的谐振[9],同时电力系统的振荡也将会对风电机组的轴系振荡产生影响,如2013年,冀北电网所辖风电场及沽源500 kV串补送出线路多次发生频率约43 Hz的次同步功率振荡,造成了大量双馈风电机组集体脱网。双馈风电机组的这种有功振荡会成为其轴系振荡的激励,增加轴系振荡放大甚至产生不稳定的风险[12]。
因此,对风电机组轴系振荡动态过程的分析具有重要意义。常用的分析方法包括特征值分析法和复转矩分析法两种。特征值分析法通过构建风电机组在某一运行状态下的线性化模型对轴系振荡进行模态分析。通过该方法,文献[13]中对比研究了采用轴系单质量块和两质量块模型的风电机组模型,指出两质量块模型能更好地模拟风电机组的动态特性。文献[8]中定性分析了风电机组各参数、运行转速及电网强度对其轴系振荡模态的影响规律。文献[14]中则进一步通过特征值灵敏度的定量分析,指出风电机组轴系振荡模态受其传动链参数的影响较大。文献[15]中为消除特征值灵敏度指标中参数量纲的影响,提出了累计相对特征根灵敏度的概念,并在此基础上定量评估了双馈风电机组附加控制对机组本身轴系振荡阻尼的影响。然而,特征值分析法得到的主要是轴系振荡的振荡模态及特征根灵敏度等性质,便于大型电力系统的稳定分析计算,却难以从机理上解释其结果产生的原因和直接用于指导稳定控制器的设计。
为了更深入地分析轴系振荡具体成因以及各参数对该振荡的影响规律,便于阻尼控制器的设计,复转矩分析法被应用到了轴系振荡的分析中。文献[16]通过复转矩分析法,指出双馈风电机组轴系振荡的成因之一来自励磁变频器的控制作用。文献[12]中进一步对双馈风电机组电磁转矩与电机转速之间的关系进行了推导,并据此设计了轴系振荡阻尼控制器。文献[17]则应用复转矩分析法分析了不同控制策略对风电机组轴系振荡的影响。然而,文献[12,16]的分析均基于风轮机质量远大于发电机质量的前提,在建模中都忽略了风轮机质量块的动态特性。文献[17]则在忽略风电机组轴系固有机械阻尼作用的前提下认为风轮机质量块转速的微增量与发电机转速的微增量始终反相。以上文献所建立的复转矩分析模型都基于某一特定前提进行了简化,因此均未能全面反映轴系双质量块模型的动态特性[16]。
在实际运行中,风电机组既处于电力系统的各种扰动之下,还会受到风速扰动的影响[10]。并且运行范围广,其运行转速的变化会对轴系振荡模态产生影响[8,13]。然而目前可以完全反映双质量块动态特性的风电机组轴系振荡复转矩分析模型及利用复转矩分析风电机组运行转速对其轴系振荡影响机理的研究仍未见相关文献报道。因此,本文基于风电机组传动轴系的双质量块详细模型,对其小干扰过程中的电磁耦合、机械耦合关系进行了深入分析,并通过定量推导得到了表征电磁耦合回路及机械耦合回路的传递函数。首次建立起可以完全反映轴系双质量块动态特性的单机系统复转矩分析模型,并基于此模型进一步推导得出了轴系振荡模式的同步转矩系数及阻尼转矩系数各分量的数学表达式。定量分析了风电机组在最大风率跟踪(MPPT)控制模式下不同运行转速对其轴系振荡模式的影响机理。
1 双馈风电机组模型
本文所研究的双馈风电机组单机无穷大系统如
1.1 机械传动系统
在进行轴系振荡分析时,可将风轮机与齿轮箱等效为一个质量块,发电机等效为另一质量块,并将齿轮箱转动柔性等效至传动轴[18],这样,风电机组的机械传动系统可以用考虑到轴系刚性作用和转动阻尼作用的两质量块模型表示。在统一标幺后,折算到高速轴的微分方程如式(1)所示
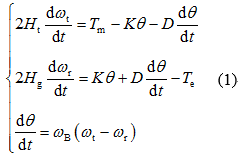
式中:
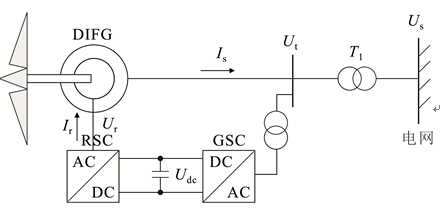 图1
双馈风电机组单机无穷大系统
Fig.1
Single DFIG infinite bus system
图1
双馈风电机组单机无穷大系统
Fig.1
Single DFIG infinite bus system
轮机的电角速度;
1.2 双馈感应发电机
忽略双馈感应发电机的磁链饱和效应、功率损耗,并假设绕组三相对称、气隙磁链按正弦分布。采用发电机惯例,在
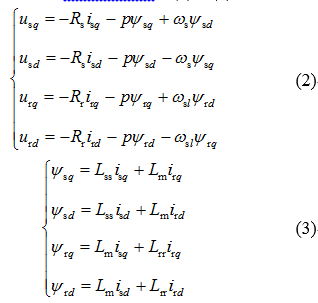
式中:微分算子$p=\frac{1}{{{\omega }_{B}}}\frac{d}{dt}$;
示为
\({{T}_{e}}={{L}_{m}}\left( {{i}_{sq}}{{i}_{rd}}-{{i}_{sd}}{{i}_{rq}} \right)\) (4)
1.3 变频器模型
双馈风电机组采用两个背靠背、通过直流环节连接的变频器进行励磁。其中转子侧变频器(rotor side converter, RSC)主要用于实现风电机组输出有功、无功功率的解耦控制。网侧变频器(grid side converter, GSC)则主要用于保持直流母线电压的稳定及保证风电机组的正常运行。本文中的变频器主要用于实现MPPT控制和单位功率因数控制。
考虑到双馈风电机组在遭受扰动后,变频器的电磁暂态过程比机组轴系的机电暂态过程要快得多。同时变频器对风电机组特征根的影响依赖于所采用的控制策略及控制参数,在小干扰分析中并不能真实反映风电机组的动态特性[8]。因此本文在分析过程中忽略变频器的动态过程,直接令各变频器输出的控制电压为其相应的参考值。
2 双馈风电机组轴系振荡复转矩分析
2.1 轴系振荡模型框图
对式(1)进行线性化,可得
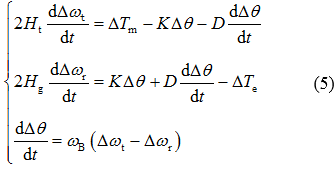
将式(5)中前两式相减并整理得到
式中:
将风轮机相对于发电机的角位移增量Δ
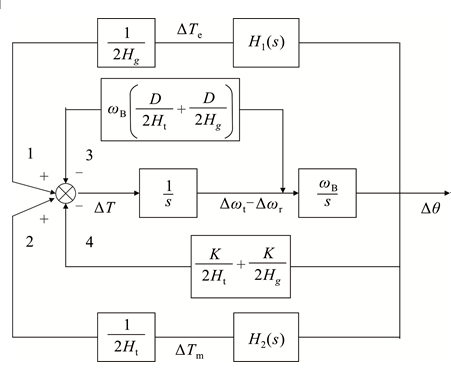 图2
风电机组轴系振荡复转矩分析模型
Fig.2
Complex torque analysis model of DFIG’s
torsional oscillation
图2
风电机组轴系振荡复转矩分析模型
Fig.2
Complex torque analysis model of DFIG’s
torsional oscillation
之间的关系。支路3和支路4分别用于表征风电机组机械传动部分的阻尼特性与刚性特性。
根据阻尼转矩及同步转矩的定义,
\(\Delta T=-\left( {{K}_{s}}\Delta \theta +{{K}_{d}}s\Delta \theta \right)\) (7)
式中:
2.2 电磁耦合支路及机械耦合支路传递函数
首先对电磁耦合支路进行分析,在定子磁链定向的坐标系中,双馈电机定子磁链及电压满足
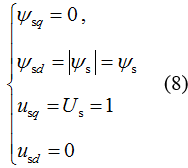
将式(8)中的
可得
式中:
式中\(\sigma =1-{L_{m}^{2}}/{{{L}_{rr}}{{L}_{ss}}}\;\)。将式(10)表示的转子磁链
式中:$a=\left( \frac{\sigma {{L}_{rr}}s}{{{\omega }_{B}}}+{{R}_{r}} \right)$;$b={{\omega }_{sl}}\sigma {{L}_{rr}}$。忽略两微增
量相乘的项
\(\Delta {{i}_{rq}}=\frac{b{{\psi }_{rq}}-a{{\psi }_{rd}}}{{{a}^{2}}+{{b}^{2}}}\Delta {{\omega }_{r}}\) (12)
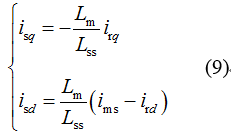
将式(9)代入式(4)得到双馈电机电磁转矩
\({{T}_{e}}={{L}_{m}}\left( {{i}_{sq}}{{i}_{rd}}-{{i}_{sd}}{{i}_{rq}} \right)=-\frac{L_{m}^{2}}{{{L}_{ss}}}{{i}_{ms}}{{i}_{rq}}\) (13)
对式(13)进行线性化
\(\Delta {{T}_{e}}=-\frac{L_{m}^{2}}{{{L}_{ss}}}{{i}_{ms}}\Delta {{i}_{rq}}\) (14)
再将式(12)代入式(14)中可得
将式(15)代入式(5)的第2个式子中,可得到Δ
\(\Delta {{\omega }_{r}}=\frac{K+Ds}{2{{H}_{g}}s+G\left( s \right)}\Delta \theta \) (16)
再将式(16)代入到式(15)中,即可得到
\({{H}_{1}}\left( s \right)=G\left( s \right)\frac{K+Ds}{2{{H}_{g}}s+G\left( s \right)}\) (17)
对于机械耦合支路,风轮机输出的机械转矩
\({{T}_{m}}=\frac{{{P}_{m}}}{{{\omega }_{t}}}\) (18)
对式(18)进行线性化,再将其代入式(5)的第1个式子中,可得到Δ
\(\Delta {{\omega }_{t}}=-\frac{K+Ds}{2{{H}_{t}}s+{{{P}_{m}}}/{\omega _{t}^{2}}\;}\Delta \theta \) (19)
将式(19)代入到式(18)的线性化方程中,即可得到
\({{H}_{2}}\left( s \right)=\frac{{{P}_{\operatorname{m}}}}{\omega _{t}^{2}}\frac{K+Ds}{2{{H}_{t}}s+{{{P}_{m}}}/{\omega _{t}^{2}}\;}\) (20)
2.3 轴系振荡转矩系数
令Re\(\left\{ H\left( s \right) \right\}\)和Im\(\left\{ H\left( s \right) \right\}\)分别代表复频域中
\(H\left( s \right)=\operatorname{Re}\left\{ H\left( s \right) \right\}+\text{j}\operatorname{Im}\left\{ H\left( s \right) \right\}=\operatorname{Re}\left\{ H\left( s \right) \right\}+\)
\(\text{j}{{\omega }_{d}}\frac{\operatorname{Im}\left\{ H\left( s \right) \right\}}{{{\omega }_{d}}}=\operatorname{Re}\left\{ H\left( s \right) \right\}+\frac{\operatorname{Im}\left\{ H\left( s \right) \right\}}{{{\omega }_{d}}}s\) (21)
对
类似地,得到机械耦合支路的同步转矩系数
支路3表征了风电机组轴系固有的阻尼转矩作用,该支路的阻尼转矩系数
\({{K}_{gd}}=\frac{D}{2{{H}_{t}}}+\frac{D}{2{{H}_{g}}}\) (24)
支路4表征了风电机组轴系固有的同步转矩作用,该支路的同步转矩系数
\({{K}_{gs}}=\frac{K}{2{{H}_{t}}}+\frac{K}{2{{H}_{g}}}\) (25)
风电机组轴系振荡的同步转矩系数及阻尼转矩系数为以上各支路分量之和。即
\(\left\{ \begin{align} & {{K}_{s}}(s)={{K}_{es}}(s)+{{K}_{ms}}(s)+{{K}_{gs}} \\ & {{K}_{d}}(s)={{K}_{ed}}(s)+{{K}_{md}}(s)+{{K}_{gd}} \\ \end{align} \right.\) (26)
3 运行转速对轴系振荡特性的影响分析
3.1 轴系振荡模式分析
风电机组轴系振荡的特征方程可以写成
\(\frac{1}{{{\omega }_{B}}}{{s}^{2}}+{{K}_{d}}(s)s+{{K}_{s}}(s)=0\) (27)
将式(15)、(17)、(20)-(26)代入式(27)中得到表征风电机组运行特性的高阶方程,求解该方程并筛选出振荡频率在几Hz范围内的振荡模式[8],得到的即是轴系振荡模式。本文采用文献[8]中给出的2 MW/690 V风电机组参数进行具体计算,具体参数值见
由
采用同一组参数,根据方程式组(1)-(4)在MATLAB/Simulink中搭建风电机组小信号仿真分
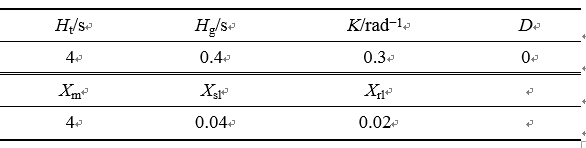 表1
风电机组各参数值
Table
1 Parameters of DFIG
表1
风电机组各参数值
Table
1 Parameters of DFIG
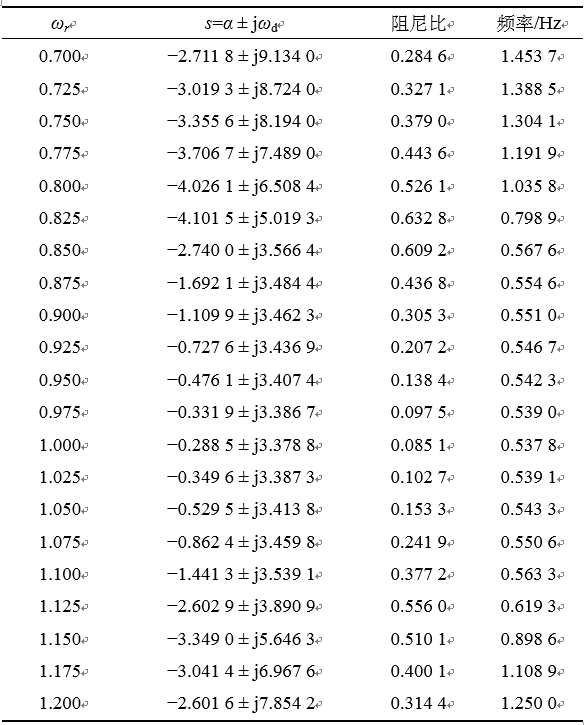 表2
风电机组轴系振荡特征值及模态理论分析结果
Table
2 Theoretical analysis results of DFIG’s torsional oscillation mode’s eigenvalue and modal
表2
风电机组轴系振荡特征值及模态理论分析结果
Table
2 Theoretical analysis results of DFIG’s torsional oscillation mode’s eigenvalue and modal
析模型,并让其转子转速标幺值
3.2 轴系振荡模式各转矩分量分析
为了更深入的揭示轴系振荡模态随风电机组运行转速变化的原因,将
将
1)由于风电机组传动轴刚性系数
2)由于风电机组运行在MPPT控制模式下时不根据转子转速的反馈调节风轮机捕获的机械功率,桨距角始终保持为0,并且风轮机惯量常数
3)由于双馈电机的旋转电势
并且,由文献[20]可知,一个振荡模式的振荡角频率
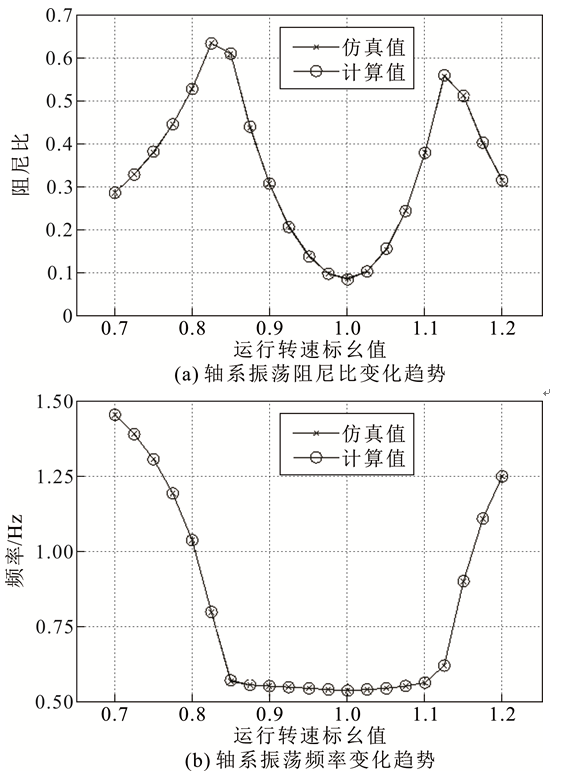 图3
风电机组轴系振荡模态变化仿真值与计算值
Fig.3
Simulation results and calculated results of the variation of DFIG’s torsional oscillation modal
图3
风电机组轴系振荡模态变化仿真值与计算值
Fig.3
Simulation results and calculated results of the variation of DFIG’s torsional oscillation modal
 表3
风电机组轴系振荡模态各转矩值
Table
3 Torques of DFIG’s torsional oscillation mode
表3
风电机组轴系振荡模态各转矩值
Table
3 Torques of DFIG’s torsional oscillation mode
\({{\omega }_{d}}={{\omega }_{\operatorname{B}}}\sqrt{\frac{{{K}_{s}}}{{{\omega }_{\operatorname{B}}}}-{{\left( \frac{{{K}_{\operatorname{d}}}}{2} \right)}^{2}}}\ \ \xi =\frac{{{K}_{d}}{{\omega }_{\operatorname{B}}}}{2\sqrt{{{\omega }_{\operatorname{B}}}{{K}_{s}}}}\) (28)
又
\(f\propto \sqrt{\frac{{{K}_{\operatorname{s}}}}{{{\omega }_{B}}}}\ \ \xi \propto \frac{{{K}_{d}}}{\sqrt{{{K}_{s}}}}\) (29)
根据
1)当风电机组转子转速标幺值
2)当风电机组转子转速标幺值
3)当风电机组转子转速标幺值
综上所述,通过转矩分析,发现本文所建立复转矩分析模型的特性和仿真结果符合的很好,进一步证明了本模型对风电机组轴系振荡各转矩性质描述的正确性,适用于指导风电机组参数的优化和轴系振荡阻尼控制器的设计。
4 时域仿真验证
为验证前文中基于线性化后的风电机组模型所得分析结果的有效性,本节在文献[8]的基础上结合文献[21-25]等建立了考虑变频器动态的风电机组平均值动态模型,仿真得到了由风轮机相对于发电机转子的角位移
仿真中风电机组的机械耦合支路分两种情况:机械耦合支路不解耦,此时机械耦合支路解耦,此时Δ
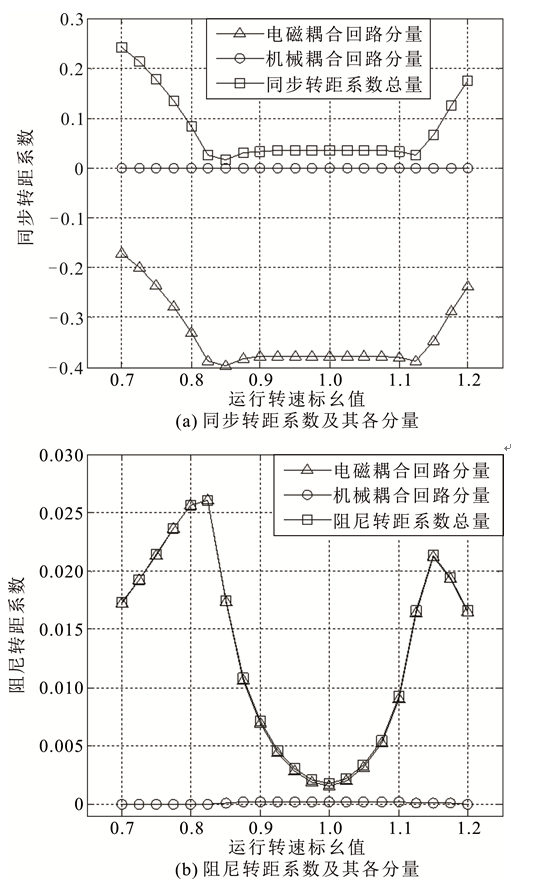 图4
风电机组轴系振荡转矩系数变化情况
Fig.4
Torques variation of DFIG’s torsional oscillation
图4
风电机组轴系振荡转矩系数变化情况
Fig.4
Torques variation of DFIG’s torsional oscillation
跌落为0.9,
从仿真结果中不难看出在机械耦合支路解耦及不解耦两种状态下得到的轴系振荡曲线基本重合。表明在MPPT控制模式下,风电机组的机械耦合支路近似于解耦,其运行转速的变化主要通过电磁耦合支路对其轴系振荡模态产生影响。当风电机组转子转速标幺值为0.7和1.2时,不难发现在2~4 s期间,风电机组轴系振荡曲线的主导振荡模态的振荡次数多于2次,表明风电机组的轴系振荡频率>1 Hz。当转子转速为标幺值1.0时,该振荡频率在0.5 Hz左右,且振荡的阻尼较弱,直到12 s左右时振荡仍然没有平息。故从
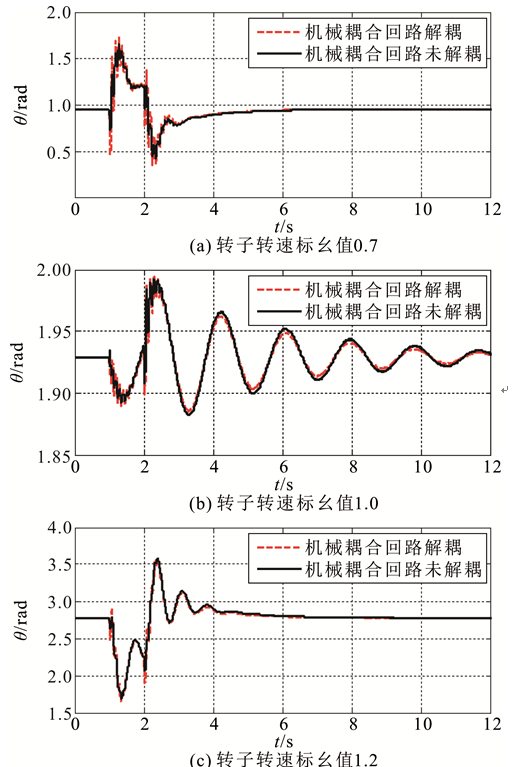 图5
风电机组轴系的动态响应
Fig.5
Dynamic response of DFIG’s drive train
图5
风电机组轴系的动态响应
Fig.5
Dynamic response of DFIG’s drive train
而当风电机组处于同步运行转速时,轴系振荡模式的阻尼比远小于其他运行转速时的阻尼比,动态过程持续时间最长。这与前文中通过复转矩分析所得的结论相符,从另一个方面验证了本文中复转矩分析模型的建立以及基于该模型计算所得结论的准确性。
5 结论
1)在分析处于MPPT控制模式下的风电机组轴系振荡时,可认为机械耦合支路解耦,其运行转速的变化主要通过电磁耦合支路影响该振荡模态。
2)随着风电机组运行转速的增大,其同步转矩先减小,随后基本保持不变,然后再增大。其阻尼转矩在机组处于次同步和超同步运行转速内时均先增大后减小,在同步转速时达到最小值。
3)本文建立了可以完全反映双馈风电机组轴系双质量块动态特性的复转矩分析模型。基于此模型进行分析得到的结果与特征值仿真分析、时域仿真分析的结果均保持一致,验证了本模型良好的准确性。本文提出的复转矩分析模型为进一步揭示双馈风电机组轴系振荡的内在规律提供了基础。
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]