



0 引言
随着经济水平的不断提高和城市化进程的快速推进,环境友好性和能源可持续性逐步成为城市电网规划建设的两大目标。在人口日益增加及交通拥堵问题进一步凸显的状况下,电气化城市轨道交通成为公共交通网络的发展方向[1-2];同时为了解决环境污染和能源危机等问题,实现经济的低碳发展和可持续性进步,电动汽车代替传统汽车成为必然趋势[3-4]。因此,由电气化轨道交通车辆和电动汽车组成的城市综合交通系统将成为电网负荷的重要组成部分,其供电系统的低碳节能、绿色环保是城市电网可持续发展的关键一环,也是世界各国所面临的共同课题。
传统的直流牵引供电系统一般利用不可控二极管整流器供电,电力机车运行所需的能量全部来源于公共电网,当直流母线参考电压为750 V时,其波动范围标准为500~900 V。城市轨道交通车辆具有运行站距短、启动和制动频繁的特点,电力机车在运行线路上频繁制动形成可观的制动能量,由于直流牵引供电系统的不可控供电方式,制动能量必须被消耗或回收,以维持直流母线电压的稳定,而制动能量回收可以提高系统的整体能源利用效率,符合牵引供电系统的可持续发展方向[5]。另一方面,能源供给是电动汽车发展和普及的基础,电动汽车的能源供给模式包括插电和换电两种[6]。相对于插电模式,基于动力电池租赁和集中式充电的换电模式具有诸多优势,已经成为电动汽车产业极具竞争力的发展模式。换电站可对动力电池进行统一管理,特定情形下作为储能为系统其他单元提供支撑[7-9]。
对于直流牵引供电系统和电动汽车换电站来说,如果依旧单一地通过传统集中式的公共电网获取电能,那么其可持续性与经济性将大大下降,也难以满足其安全性与可靠性要求。因此,充分利用城市轨道交通线路的空间来引入以可再生能源为主的分布式电源,同时结合储能装置和电动汽车换电站,形成基于直流微电网的城市综合交通供电系统,是直流牵引供电系统全新的发展思路[10]。直流微电网的应用已经渗透到可持续性建筑、绿色数据中心、电动汽车充电站、电气化船舶、多电飞机等领域[11-14],而城市综合交通供电系统将是直流微电网又一应用尝试。
直流微电网是由分布式电源、储能装置、负荷设施按照特定的拓扑架构组成的自治系统,具有多源、多荷、多储、多运行模态的特点[15-18]。如何协调各单元以保证系统功率平衡和直流母线电压稳定是当前直流微电网的研究重点,也是其安全稳定、灵活高效运行的关键[19-22]。文献[23]提出了包括3级架构的分层控制策略,直流微电网系统包括1个中央控制器,初级控制利用下垂控制方式稳定直流母线电压,次级控制主要调整初级控制中引起的电压偏差,3级控制负责系统的功率优化与分配。文献[24]提出了一种孤岛直流微电网协调控制策略,包括初级控制和集中式的2级控制2层,初级控制是基于储能单元荷电状态的直流母线电压控制,并利用电压信号控制系统源荷平衡,2级控制利用中央控制器实现直流母线电压的补偿。传统的分层控制一般利用中央控制器进行能量管理,并对系统各单元集中监控,通常情况下能够较好地实现控制目标,但系统对中央控制器及通信线路依赖过高,使整体可靠性大大降低。为了提高系统控制的灵活性和可靠性,文献[25]提出了基于直流母线电压信号(DBS)的协调控制策略,文献[26-28]对该控制策略进行了优化和改进。以直流母线电压做为系统功率状况的评判信号,省去了中央控制器和通信线路,各单元接口变换器可以平滑切换控制模式,实现系统的功率平衡。但是上述控制策略没有考虑多源间的精确功率分配问题,同时电压为局部变量,各单元接入直流母线点的电压不同,因此会影响系统的模式切换。
本文将电气化轨道交通车辆的直流牵引供电系统和电动汽车换电站结合起来,同时在系统中引入以可再生能源为主的直流微电网,从而形成一个绿色环保、灵活互补、安全可靠的动态城市综合交通供电系统。该系统可以实现地铁的电力机车供电、制动能量回收及电动汽车换电站中动力电池的充电,在充分利用可再生能源的同时增加各单元运行的经济性。针对所研究的城市综合交通供电系统,进一步结合传统分层控制中可靠性方面和基于DBS的协调控制策略中分布式电源功率分配方面的不足,提出了基于DBS和低带宽通信的协调控制,对各模式间的切换信号进行了优化,加入了电压信号同步预处理环节,同时利用协调控制策略下各单元的信息交换能力,提出了基于自适应虚拟阻抗的改进下垂控制,实现了分布式电源间的功率均分。最后,为验证所提系统及控制策略的有效性,利用Matlab/Simulink搭建了模型,对系统各个运行模式进行了仿真。
1 城市综合交通供电系统简介
现有的直流牵引供电系统中普遍采用双边供电形式,当一端变电站发生故障时,可以采用单边供电方式维持,从而提高供电质量。在此基础上进行改进,城市综合交通供电系统拓扑结构如
当电力机车启动时,系统的功率关系为
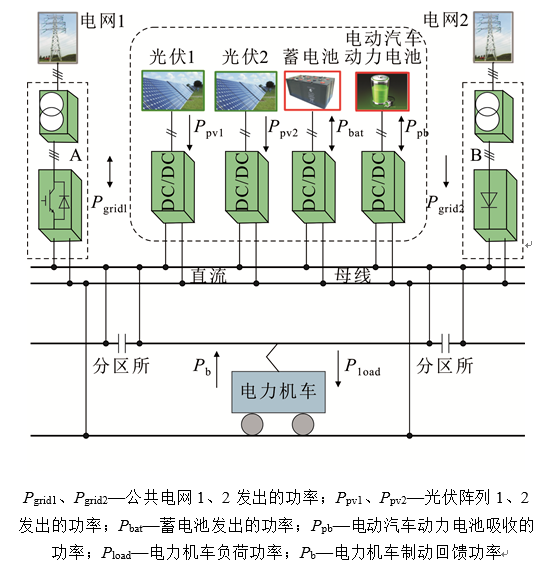 图1
城市综合交通供电系统拓扑结构
Fig.1
Power supply system topology of urban comprehensive transportation
图1
城市综合交通供电系统拓扑结构
Fig.1
Power supply system topology of urban comprehensive transportation
\({{P}_{\mathrm{grid1}}}\mathrm{+}{{P}_{\mathrm{grid2}}}\mathrm{+}{{P}_{\mathrm{pv1}}}\mathrm{+}{{P}_{\mathrm{pv2}}}\mathrm{=}-{{P}_{\mathrm{bat}}}\mathrm{+}{{P}_{\text{p}\mathrm{b}}}\mathrm{+}{{P}_{\mathrm{load}}}\) (1)
当电力机车制动时,系统的功率关系为
\({{P}_{\text{grid}1}}\text{+}{{P}_{\text{grid2}}}\text{+}{{P}_{\text{pv}1}}\text{+}{{P}_{\text{pv}2}}\text{+}{{P}_{\text{b}}}\text{=}-{{P}_{\text{bat}}}\text{+}{{P}_{\text{pb}}}\) (2)
正常情况下,直流微电网运行在并网状态,公共电网1通过双向AC-DC变换器控制功率的大小与流向。当公共电网1断开连接时,电网2不能对直流母线电压进行控制,因此定义该系统的此种状态为直流微电网类孤岛状态。将电动汽车换电站和城市轨道交通直流牵引供电系统结合形成城市综合交通供电系统,同时引入以可再生能源为主的直流微电网辅助供电,可以实现电动汽车动力电池充电和电力机车制动能量回收,提高直流牵引供电系统的可靠性,减少电动汽车换电站的建设成本,增加系统整体的灵活性、低碳性和经济性。在电力机车运行低谷时段,传统直流牵引供电系统的牵引变电站功率因数较低,而此时增加换电站中电动汽车动力电池的充电功率,从而达到提高牵引变电站功率因数的效果。因此,通过各单元间的互补融合和协调控制,可以实现可再生能源的有效利用和城市综合交通系统的可持续供电。
2 基于DBS和低带宽通信的协调控制
传统的DBS协调控制策略虽然不需要借助通信线路,但是不能实现系统功率的优化和直流母线电压的补偿,容易造成各模式间切换失败,同时电力机车为冲击性负荷,在启动和制动过程中产生较大的功率变化,如果利用下垂控制分配功率的光伏电源间不能实现功率精确,将会对系统稳定性产生影响。而分层控制策略需要依赖中央控制器进行直流母线电压的调节和协调运行模式的切换,这样就大大降低了系统整体的可靠性。因此,提出基于DBS和低带宽通信的协调控制策略,以实现城市综合交通供电系统的功率平衡和直流母线电压的稳定。
该协调控制策略以DBS为各模式间的切换判据,省去了模式切换所需要的集中控制器,而利用低带宽通信进行各单元本地信息的交换,实现系统DBS的统一,提高各模式间切换的可靠性,同时进行变换器下垂控制策略下的功率精确分配处理,进一步提高系统的性能,该协调控制策略下系统的工作模式及协调控制流程见
换的开关变量,\(\Delta U_{\text{dc}}^{*}\)为直流母线电压参考信号标幺
值与预处理后的直流母线电压信号标幺值的差。由于系统中电压并不是全局变量,各单元在直流母线连接点处的电压各不相同,因此加入电压信号同步预处理环节,以保证模式切换的可靠进行。
当直流微电网运行在并网状态时,直流母线电压信号为:
\({{U}_{\text{dc}}}\text{=}\frac{{{U}_{\text{g}1}}\text{+}\sum\limits_{i\text{=}1}^{n{}_{1}}{{{U}_{\text{P}i}}}\text{+}\sum\limits_{i\text{=}1}^{{{n}_{\text{2}}}}{{{U}_{\text{b}i}}}\text{+}\sum\limits_{i\text{=}1}^{{{n}_{\text{3}}}}{{{U}_{\text{Pb}i}}}}{N}\) (3)
\(N\text{=}1\text{+}{{n}_{\text{1}}}\text{+}n{}_{\text{2}}\text{+}{{n}_{\text{3}}}\) (4)
当直流微电网运行在孤岛状态时,直流母线电压信号为:
\({{U}_{\text{dc}}}\text{=}\frac{\sum\limits_{i\text{=}1}^{{{m}_{1}}}{{{U}_{\text{P}i}}}\text{+}\sum\limits_{i\text{=}1}^{{{m}_{\text{2}}}}{{{U}_{\text{b}i}}}\text{+}\sum\limits_{i\text{=}1}^{{{m}_{\text{3}}}}{{{U}_{\text{Pb}i}}}}{M}\) (5)
\(M\text{=}{{m}_{\text{1}}}\text{+}{{m}_{\text{2}}}\text{+}{{m}_{\text{3}}}\) (6)
\(U_{\text{dc}}^{\text{*}}\text{=}\frac{{{U}_{\text{dc}}}}{{{U}_{\text{dcf}}}}\) (7)
\(U_{\text{dcf}}^{\text{*}}\text{=}\frac{{{U}_{\text{dcf}}}}{{{U}_{\text{dcf}}}}\)=1 (8)
式中:
 图2
系统工作模式及协调控制流程图
Fig.2
Flow chart of working mode and coordinated control
图2
系统工作模式及协调控制流程图
Fig.2
Flow chart of working mode and coordinated control
伏单元、蓄电池储能单元、动力电池充电单元的个数;
数;\(U_{\text{dc}}^{\text{*}}\)为直流母线电压信号的标幺值;\(U_{\text{dcf}}^{\text{*}}\)为直
流母线电压参考的标幺值。
系统以经过同步预处理的直流母线电压为切换信号,当系统功率状况发生变化时,直流母线电压会出现波动,当达到电压切换阈值时会出现模式转变。系统在每种工作模式下都有1个单元来维持直流母线电压的稳定,此时该单元可等效为电压源,其他单元可等效为电流源,城市综合交通供电系统具体可以划分为4种工作模式。
1)工作模式1:此时\(-0.07\le \Delta U_{\text{dc}}^{*}<-0.02\),
0≤
2)工作模式2:此时\(-0.02\le \Delta U_{\text{dc}}^{*}<0.03\),
1≤
3)工作模式3:此时\(0.03\le \Delta U_{\text{dc}}^{*}<0.08\),2≤
直流微电网运行在类孤岛状态。光伏电源工作在MPPT控制模式,动力电池进行恒功率充电,蓄电池通过恒压模式控制直流母线电压的稳定,当系统出现功率缺额时蓄电池放电,出现功率余额时蓄电池充电。
4)工作模式4:此时\(0.08\le \Delta U_{\text{dc}}^{*}<0.13\),3≤
直流微电网运行在类孤岛状态,系统功率缺额超过了蓄电池的最大放电功率。光伏电源工作在MPPT控制模式,蓄电池以最大功率进行放电,为了保证电力机车的电力供应,电动汽车动力电池需要进行部分功率切除,必要时动力电池可以通过放电弥补系统功率缺额。
3 基于自适应虚拟阻抗的改进下垂控制
3.1 并联光伏电源系统稳态分析
\({{U}_{\text{D}1}}\text{=}{{U}_{\text{1}}}-{{I}_{\text{1}}}{{R}_{\text{droop1}}}\) (9)
\({{U}_{\text{D}2}}\text{=}{{U}_{2}}-{{I}_{2}}{{R}_{\text{droop2}}}\) (10)
同时根据
\({{I}_{\text{L}}}\text{=}{{I}_{1}}\text{+}{{I}_{2}}\) (11)
\({{U}_{\text{D}1}}\text{=}{{I}_{1}}{{R}_{1}}\text{+}{{I}_{\text{L}}}{{R}_{\mathrm{L}}}\) (12)
\({{U}_{\text{D2}}}\text{=}{{I}_{2}}{{R}_{2}}\text{+}{{I}_{\text{L}}}{{R}_{\mathrm{L}}}\) (13)
由式(9)—(13)可以分别得到2个光伏电源的输出电流:
\({{I}_{1}}=\frac{({{R}_{\mathrm{L}}}+{{R}_{2}}\text{+}{{R}_{\text{droop2}}}){{U}_{1}}-{{R}_{\mathrm{L}}}{{U}_{2}}}{({{R}_{\mathrm{L}}}+{{R}_{2}}\text{+}{{R}_{\text{droop2}}})({{R}_{\mathrm{L}}}+{{R}_{1}}\text{+}{{R}_{\text{droop1}}})-{{R}_{\mathrm{L}}}^{2}}\) (14)
\({{I}_{2}}=\frac{({{R}_{\mathrm{L}}}+{{R}_{1}}\text{+}{{R}_{\text{droop1}}}){{U}_{2}}-{{R}_{\mathrm{L}}}{{U}_{1}}}{({{R}_{\mathrm{L}}}+{{R}_{1}}\text{+}{{R}_{\text{droop1}}})({{R}_{\mathrm{L}}}+{{R}_{2}}\text{+}{{R}_{\text{droop2}}})-{{R}_{\mathrm{L}}}^{2}}\) (15)
从式(14)—(15)可以看出,在光伏电源空载电压参考值和负载值确定后,光伏电源的输出电流取决于下垂虚拟阻抗和线路阻抗大小,而在
\({{R}_{1}}\text{+}{{R}_{\text{droop1}}}\text{=}{{R}_{2}}\text{+}{{R}_{\text{droop2}}}\) (16)
在
\({{I}_{\text{C}}}\text{=}\frac{{{I}_{1}}{{R}_{1}}-{{I}_{2}}{{R}_{2}}}{{{R}_{1}}+{{R}_{2}}}\) (17)
当2个光伏电源达到功率均分时,即
\({{I}_{\text{C}}}\text{=}\frac{{{I}_{1}}({{R}_{1}}-{{R}_{2}})}{{{R}_{1}}+{{R}_{2}}}\) (18)
通常情况下
3.2 下垂控制策略特性分析
光伏电源1、2的初始运行点分别为
时,其下垂特性曲线由
阻抗变大时,其输出特性曲线由
际运行点由
3.3 改进下垂控制策略分析
源2经过调整后的下垂虚拟阻抗。设置光伏电源1和2的初始下垂虚拟阻抗相等,
 图3
并联光伏电源的稳态等效电路
Fig.3
Steady state equivalent circuit of parallel photovoltaic sources
图3
并联光伏电源的稳态等效电路
Fig.3
Steady state equivalent circuit of parallel photovoltaic sources
 图4
传统下垂控制特性示意图
Fig.4
Characteristic of traditional droop control
图4
传统下垂控制特性示意图
Fig.4
Characteristic of traditional droop control
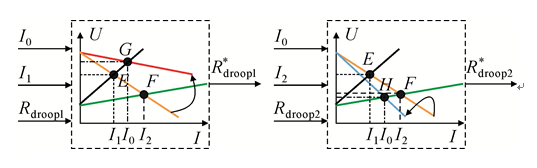 图5
自适应虚拟阻抗调整示意图
Fig.5
Adjustment schemes of adaptive virtual impedance
图5
自适应虚拟阻抗调整示意图
Fig.5
Adjustment schemes of adaptive virtual impedance
4 系统各单元变换器控制
4.1 光伏变换器控制
在该协调控制策略下,光伏单元有MPPT控制和改进下垂控制策略2种,在采用MPPT控制的工作模式中,光伏电源可以等效为电流源,
功率处的光伏参考电压,经过电压和电流双闭环控制可以得到变换器的PWM信号。当系统处于工作模式1时光伏单元采用改进下垂控制,此时光伏变换器为电压源型变换器。
4.2 储能变换器控制
蓄电池变换器在不同的工作模式下有恒压、恒功率和待机3种控制模式,
换器控制框图,图中\({{I}_{\text{bat}}}\)为蓄电池的输出电流,\({{I}_{\text{bat }\!\!\_\!\!\text{ ref}}}\)为蓄电池输出电流参考值,
达到最低或最高时,其切换到待机状态,从而防止过放或过充,提高蓄电池的使用寿命。而电动汽车动力电池为特殊类型负荷,其详细的切负荷操作流程见文献[24],而需要动力电池提供功率支撑时,其控制方式与蓄电池类似。
4.3 电网变换器控制
在系统处于并网运行状态,电网变换器控制直流母线电压的稳定,实现功率的双向流动。当电网向直流微电网释放功率时变换器处于整流状态,当电网从直流微电网吸收功率时变换器处于逆变状态。设定无功功率参考值为0,从而实现单位功率因数运行,电压外环控制直流母线电压,电流内环控制功率的大小和流向。如
控制框图,\({{Q}_{\text{g }\!\!\_\!\!\text{ ref}}}\)为电网无功功率参考值,\({{Q}_{\text{g}}}\)为电网无功功率的实测值,\({{i}_{d}}\)、\({{i}_{q}}\)和\({{u}_{d}}\)、\({{u}_{q}}\)分别为电网
并网电流和电压经坐标变换后的
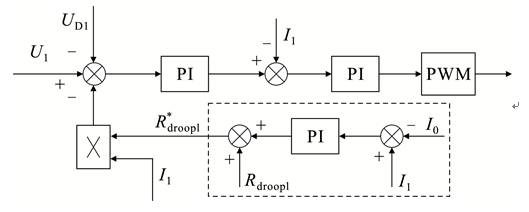 图6
改进下垂控制策略控制框图
Fig.6
Block diagram of improved droop control
图6
改进下垂控制策略控制框图
Fig.6
Block diagram of improved droop control
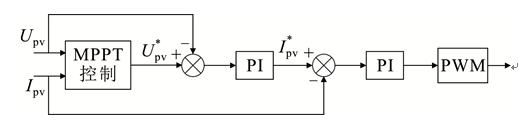 图7
光伏变换器MPPT控制框图
Fig.7
Control block diagram of MPPT for photovoltaic converter
图7
光伏变换器MPPT控制框图
Fig.7
Control block diagram of MPPT for photovoltaic converter
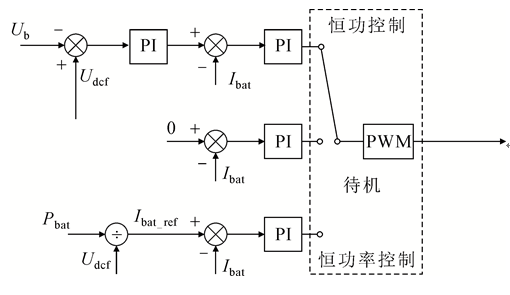 图8
蓄电池变换器控制框图
Fig.8
Control block diagram of battery converter
图8
蓄电池变换器控制框图
Fig.8
Control block diagram of battery converter
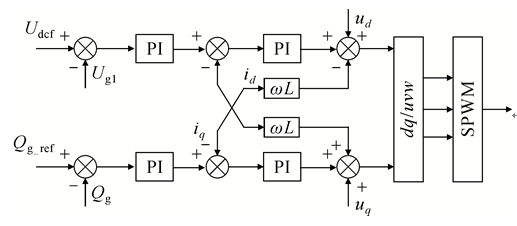 图9
电网变换器控制框图
Fig.9
Control block diagram of grid converter
图9
电网变换器控制框图
Fig.9
Control block diagram of grid converter
5 仿真验证
在Matlab/Simlink中搭建仿真模型,对所提出的协调控制策略进行验证。系统中直流母线电压参考值为750 V,电网2的额定输出功率为35 kW,光伏1和2在1 000 kW/m2、25 ℃的最大输出功率均为40 kW,蓄电池的最大充放电功率为40 kW,动力电池的额定功率为30 kW,电力机车启动时总额定功率为30 kW,制动时最大输出功率为50 kW。
5.1 改进下垂控制仿真分析
5.2 工作模式1仿真分析
表1为工作模式1下各单元的功率状况,
5.3 工作模式2仿真分析
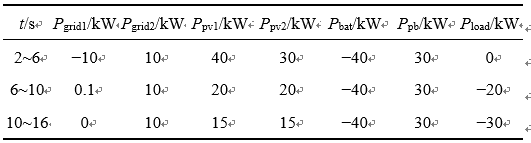 表1
工作模式1下的功率情况
Table
1 Power of working mode 1
表1
工作模式1下的功率情况
Table
1 Power of working mode 1
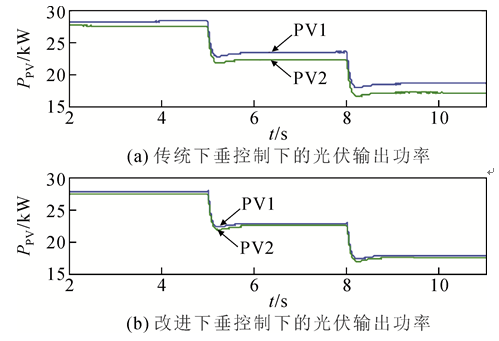 图10
下垂控制下光伏输出功率
Fig.10
Photovoltaic output power under droop control
图10
下垂控制下光伏输出功率
Fig.10
Photovoltaic output power under droop control
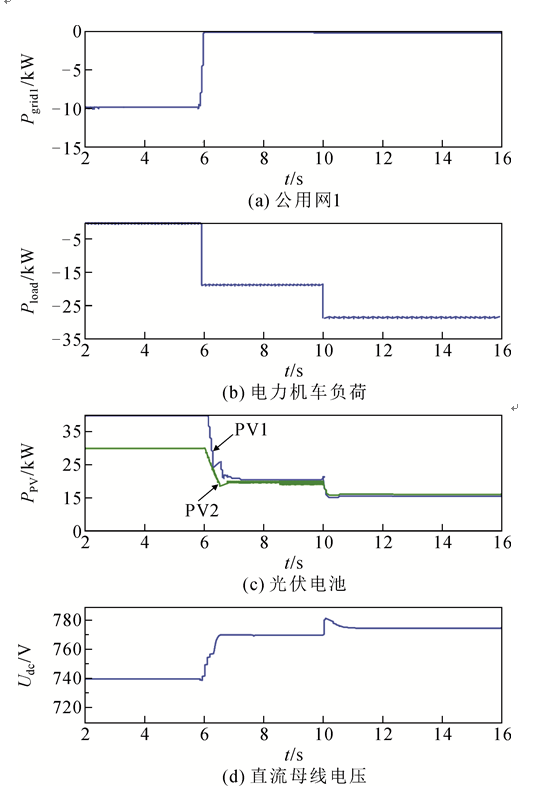 图11
工作模式1时的系统运行特性
Fig.11
System characteristics of working mode 1
图11
工作模式1时的系统运行特性
Fig.11
System characteristics of working mode 1
时调整功率的大小和流向,维持直流母线的电压稳定。电网2以35 kW的额定功率向系统供电,动力电池作为特殊负荷也以30 kW的额定值吸收功率。由于电网1的支撑作用,蓄电池工作在恒功率充电状态,充电完成后作为备用电源切换到待机状态。
仿真开始后,电力机车负荷为0 kW,光伏1的辐照度为700 kW/m2,输出功率约为27 kW,光伏2的辐照度为500 kW/m2,输出功率约为19 kW,电网1通过恒压控制吸收直流微电网中的功率余额,维持直流母线电压在理想值。3 s时电力机车开始启动,其功率不断增加,在6 s时达到了30 kW的额定功率值,在此过程中系统其他单元的功率状况保持了恒定,而电网1随着电力机车需求的增加进行功率响应,并网变换器逐渐由逆变状态转换为整流状态。6~9 s电力机车以30 kW的额定功率运行,电网1的功率输出也保持了恒定。9s时光伏1和2的辐照度分别提高为1 000 kW/m2和800 kW/m2,电力机车进入惰行状态,此时功率消耗为0,电网1又一次吸收直流微电网的功率余额。11 s时电力机车开始制动,其制动功率从50 kW逐渐减小,电力机车产生的制动能量回馈到直流微电网中,并根据既定的协调控制策略进行功率分配,从而维持直流母线的稳定。14 s时电力机车停止运行,系统在电网1 的支撑下仍旧保持稳定。通过仿真可以看出,在工作模式2中,直流母线电压在电网1的控制下始终保持在正常范围。
5.4 工作模式3仿真分析
 表2
工作模式2下的功率情况
Table
2 Power of working mode 2
表2
工作模式2下的功率情况
Table
2 Power of working mode 2
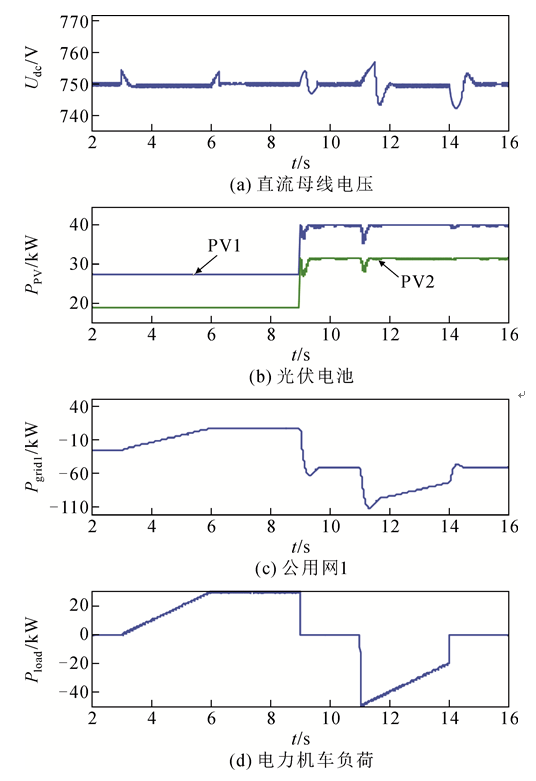 图12
工作模式2时的系统运行特性
Fig.12
System characteristics of working mode 2
图12
工作模式2时的系统运行特性
Fig.12
System characteristics of working mode 2
右,从而完成了模式转换。此后,电力机车负荷开始逐渐增加,10 s时达到了额定功率30 kW,而动力电池充电功率和光伏电源输出功率也在不断地变化。当处于工作模式3时,在系统中负荷和分布式电源变化的过程中,蓄电池在一定范围内通过充放电来平衡系统功率变化,从而维持直流母线电压的稳定。
5.5 工作模式4仿真分析
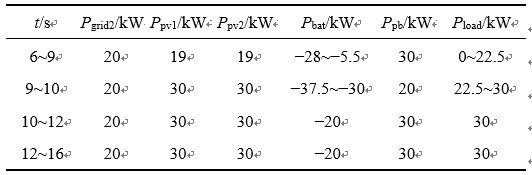 表3
工作模式3下的功率情况
Table
3 Power of working mode 3
表3
工作模式3下的功率情况
Table
3 Power of working mode 3
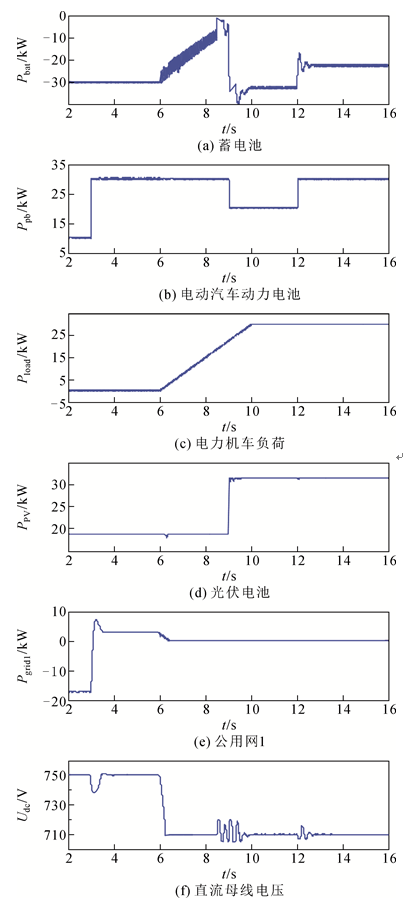 图13
工作模式3时的系统运行特性
Fig.13
System characteristics of working mode 3
图13
工作模式3时的系统运行特性
Fig.13
System characteristics of working mode 3
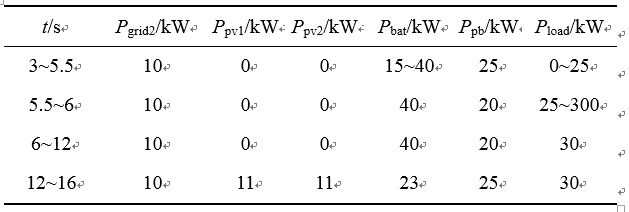 表4
工作模式4下的功率情况
Table
4 Power of working mode 4
表4
工作模式4下的功率情况
Table
4 Power of working mode 4
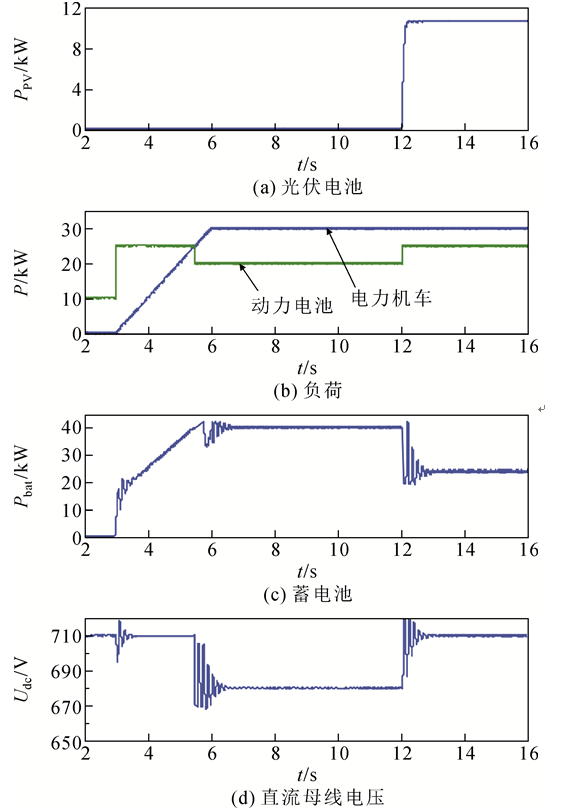 图14
工作模式4时的系统运行特性
Fig.14
System characteristics of working mode 4
图14
工作模式4时的系统运行特性
Fig.14
System characteristics of working mode 4
蓄电池平抑系统功率,3 s时电动汽车动力电池消耗的功率变为25 kW,同时电力机车消耗的功率也开始逐步增加,此时蓄电池的放电功率随着系统功率缺额的增大而提高。当到达蓄电池最大功率输出限制值时,其输出功率保持恒定,而电力机车所需的功率依旧不断增加,此时直流母线电压开始下降,并逐渐进入工作模式4的电压层区,系统稳态状态下各单元功率始终满足式(1),直流母线保持恒定,在5.5~6 s时进行切负荷,此时系统功率和直流母线电压出现波动,6 s时系统功率重新处于稳定状态,直流母线维持在680 V。12 s后辐照度增加导致光伏电源1和2的输出增加,直流母线电压开始回升,切除的负荷恢复供电。
6 结论
1)直流牵引供电系统和电动汽车换电站相结合可以增加系统的经济性,而可再生能源以直流微电网的形式为此系统进行供电,提高了系统的低碳性、灵活性和可靠性,另一方面城市综合交通系统为地铁和换电站提供了全新的运营模式,促进了2者的发展。
2)通过加入电压信号同步预处理环节,可以提高系统各运行模式间的切换稳定性,在4种运行模式中,各单元变换器根据切换信号进行控制方法的转变,可以保证系统在各种情况下的功率平衡及直流母线电压的稳定。
3)在对并联光伏电源系统稳态特性和传统下垂控制规律分析的基础上,提出基于自适应虚拟阻抗的改进下垂控制策略,可以根据分布式电源间功率分配的差额,自动调节下垂虚拟阻抗,从而实现功率均分。
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]