

0 引言
高压断路器易发生机械故障,相关统计表明,在断路器重大故障中有43%~45%的故障是由操作机构的故障引起的,断路器操作机构的安全可靠性是保证断路器可靠运行的重要因素[1-2]。操作机构的工作状态可以通过其机械特性曲线来反映。其中,分合闸线圈电流曲线可以反映分合闸电磁铁的工作状态和本体机构的部分工作状态;而触头行程-时间曲线可以反映操作机构的传动部分、本体及触头的工作状况;二者包含了操作机构的绝大部分状态信息。基于操作机构线圈电流曲线和触头行程-时间曲线的操作机构状态评估,可以及时了解和把握机构的运行状态,从而合理地制定检修计划,对保障电网安全运行具有重要意义。
国内外专家学者对高压断路器操作机构运行状态的评估进行了一些研究:文献[3-6]基于机械振动信号,分别利用动态时间规整法、支持向量机法、经验模态法和振声联合法来诊断高压断路器的操作机构机械故障;文献[7-9]研究了基于分合闸线圈电流曲线的高压断路器操作机构状态评估方法;文献[10-11]研究了基于行程-时间曲线的高压断路器操作机构状态评估方法。上述方法已经得到了一定的应用,但由于高压断路器操作机构的机械零部件多、动作复杂,致使引起故障的原因和故障点并不唯一,而上述操作机构状态评估方法都局限于利用单一的特性曲线来分析判断操作机构的健康状态,因此不能反映整个操作机构的工作状态。
本文对40.5 kV、252 kV、500 kV、800 kV和1 100 kV等多个电压等级高压断路器的弹簧和液压弹簧操作机构的机械特性进行测试,分析参数变化、机构寿命对操作机构机械性能的影响。在此基础上,研究基于操作机构的分合闸线圈电流曲线和触头行程-时间曲线的机构状态评估方法,并通过建立多级递阶ANFIS模型来综合评估操作机构的运行状况。本文研究结果对预测和防范故障、合理安排检修计划和检修重点具有重要的指导意义。
1 操作机构机械特性曲线
反映断路器操作机构机械特性的曲线主要有分合闸线圈电流曲线、触头行程-时间曲线、分合闸同期性曲线及储能电机电流曲线。其中,反映操作机构本身运行状况的主要是分合闸线圈电流曲线和触头行程-时间曲线。
1.1 分合闸线圈电流曲线
由于直流电磁系统具有可靠性高、允许频繁操作等特点,而断路器操作机构一般采用直流电磁系统,因此本文只讨论直流电磁系统。操作机构分合闸线圈电流曲线可以反映操作机构中电磁铁本身、电磁铁所控制的锁闩或阀门以及与之相连的开关本体传动机构和辅助触头在操作过程中的工作情况。操作机构的分、合闸线圈电流曲线基本相同,本文主要以分闸线圈电流曲线为例进行讨论,分闸线圈标准电流曲线如
1)
2)
3)
4)
可见,
1.2 触头行程-时间曲线
断路器操作机构的行程-时间曲线是指断路器分合闸操作过程中,动触头行程随时间变化的关系曲线,它可以反映操作机构传动部分、本体及触头的工作状况。
1) —
— 阶段:时刻,发出分合闸命令;时刻,动触头开始运动。此阶段为动触头固有动作时间,固有动作时间长短与分合闸线圈电压、回路电阻及锁扣装置阻力有关。
阶段:时刻,发出分合闸命令;时刻,动触头开始运动。此阶段为动触头固有动作时间,固有动作时间长短与分合闸线圈电压、回路电阻及锁扣装置阻力有关。
2)— 阶段:时刻,触头刚分或刚合,为动触头的平稳运动阶段,反映了动触头的运动速度,此阶段状态与储能弹簧的储能和动触头运动过
阶段:时刻,触头刚分或刚合,为动触头的平稳运动阶段,反映了动触头的运动速度,此阶段状态与储能弹簧的储能和动触头运动过
 图1
分闸线圈标准电流曲线
Fig.1
Standard current waveform of the tripping coil
图1
分闸线圈标准电流曲线
Fig.1
Standard current waveform of the tripping coil
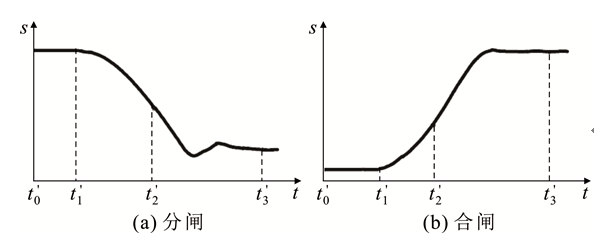 图2
分合闸触头行程-时间标准曲线
Fig.2
Travel-time standard curve for tripping/closing contact
图2
分合闸触头行程-时间标准曲线
Fig.2
Travel-time standard curve for tripping/closing contact
程中的阻力有关。此外,此阶段曲线应平滑,若机构存在卡涩,曲线将出现拐点。
3)—阶段: 时刻,动触头分、合闸完
时刻,动触头分、合闸完
成,停止运动。此阶段反映了动触头的弹跳情况,若动触头的运动速度过大,将会使动触头的弹跳增加。
上述分析表明,\阶段的运行状况可通过动触头的固有动作时间来反映;—阶段和
—阶段的运行状况均可通过动触头的运动速度来反映。动触头固有动作时间和分合闸速度是行程-时间曲线中最重要的参数,能反映操作机构的多种状态信息。因此,将、
2 操作机构特性测试和试验研究
2.1 机构特性曲线分析
本文对40.5 kV、252 kV、500 kV、800 kV、1 100 kV电压等级的弹簧和液压弹簧操作机构进行了测试,得到了不同电压等级断路器液压弹簧操作机构的特性曲线,并开展了相应的分析。
从测试结果可看出,根据机构行程-时间曲线和线圈电流曲线可以判断机构状态。
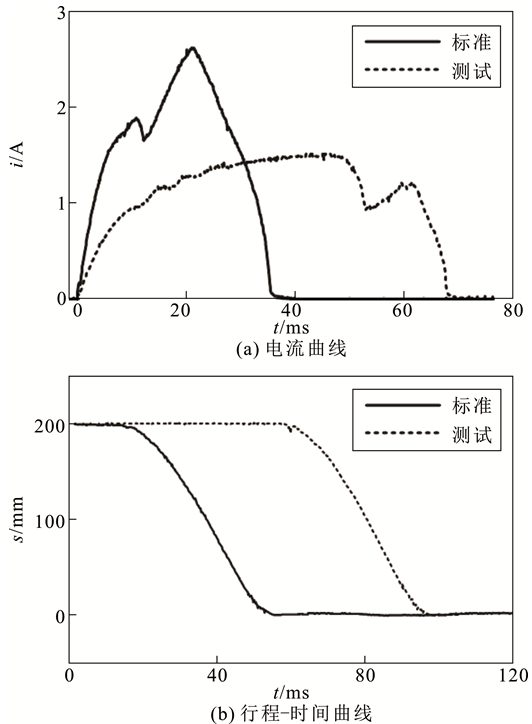 图3
252 kV断路器弹簧操作机构分闸特性曲线1
Fig.3
Tripping characteristic curve 1 of 252 kV circuit breaker spring operating mechanism
图3
252 kV断路器弹簧操作机构分闸特性曲线1
Fig.3
Tripping characteristic curve 1 of 252 kV circuit breaker spring operating mechanism
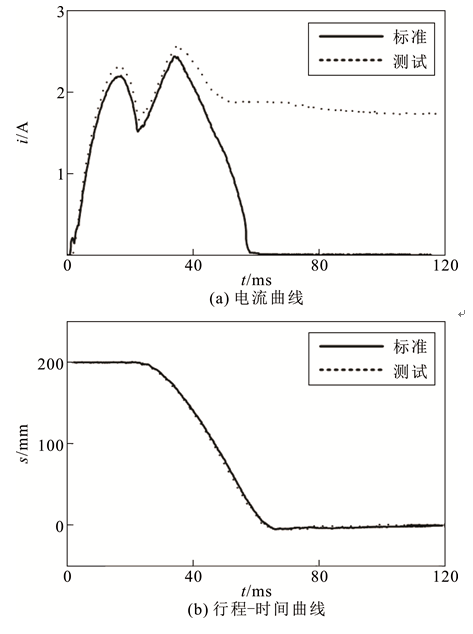 图4
252 kV断路器弹簧操作机构分闸特性曲线2
Fig.4
Tripping characteristic curve 2 of 252 kV circuit breaker spring operating mechanism
图4
252 kV断路器弹簧操作机构分闸特性曲线2
Fig.4
Tripping characteristic curve 2 of 252 kV circuit breaker spring operating mechanism
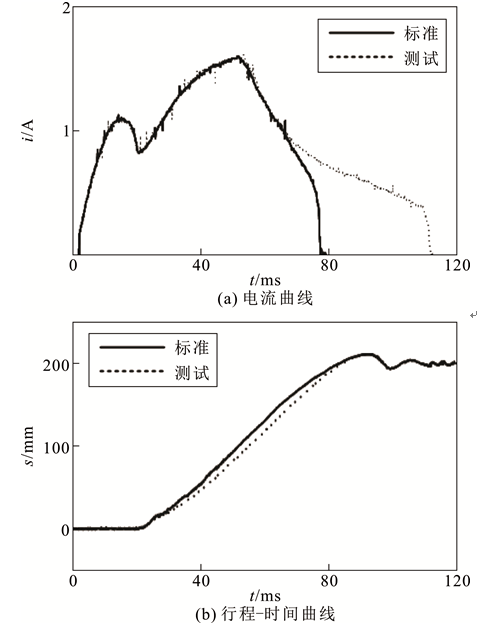 图5
252 kV断路器弹簧操作机构合闸特性曲线
Fig.5
Closing characteristic curve of 252 kV circuit breaker spring operating mechanism
图5
252 kV断路器弹簧操作机构合闸特性曲线
Fig.5
Closing characteristic curve of 252 kV circuit breaker spring operating mechanism
2.2 机构参数变化对机构特性曲线的影响
对40.5 kV断路器弹簧操作机构分别进行线圈电压、线圈回路电阻和储能弹簧力值等参数变化的试验。以分闸操作为例分析参数变化对操作机构行程-时间曲线和线圈电流曲线的影响。
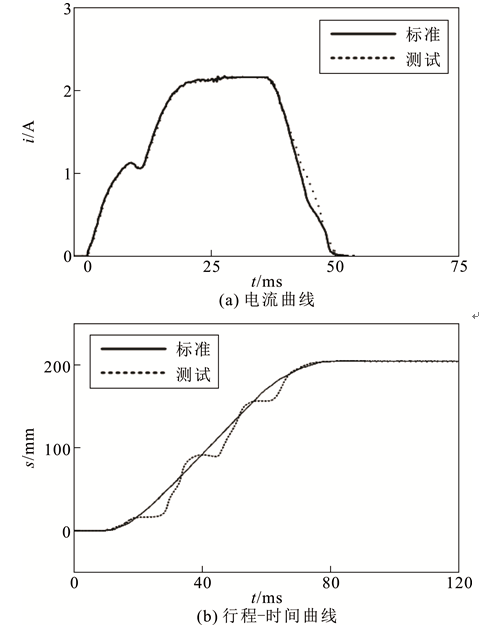 图6
1 100 kV断路器液压操作机构合闸特性曲线
Fig.6
Closing characteristic curve of 1 100 kV circuit breaker hydraulic operating mechanism
图6
1 100 kV断路器液压操作机构合闸特性曲线
Fig.6
Closing characteristic curve of 1 100 kV circuit breaker hydraulic operating mechanism
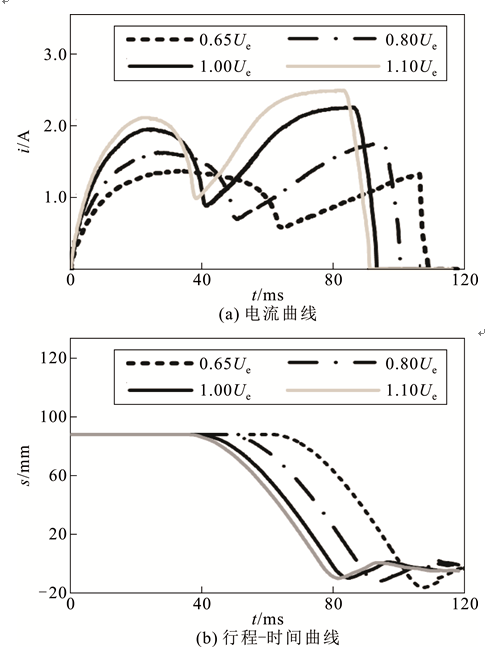 图7
线圈电压变化时分闸特性曲线
Fig.7
Tripping characteristic curve under changing coil voltage
图7
线圈电压变化时分闸特性曲线
Fig.7
Tripping characteristic curve under changing coil voltage
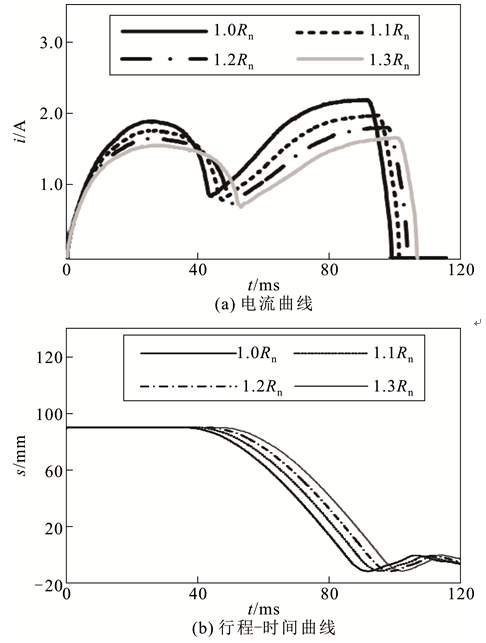 图8
线圈电阻变化时分闸特性曲线
Fig.8
Tripping characteristic curve under changing coil resistance
图8
线圈电阻变化时分闸特性曲线
Fig.8
Tripping characteristic curve under changing coil resistance
发生了明显变化,即动触头的速度发生了变化。由图可知,随着弹簧形变量的增加,动触头运动速度相应增大。
2.3 动作次数对机构特性曲线的影响
对126 kV和252 kV断路器的弹簧操作机构进行了寿命试验,得到断路器弹簧操作机构的分闸特性变化趋势曲线分别如
3 基于ANFIS的操作机构状态评估
3.1 自适应神经模糊推理系统
自适应神经模糊推理系统(ANFIS)通过将模糊推理系统和人工神经网络结合,综合了神经网络的学习机制和模糊系统的推理能力。与其他神经模糊系统相比,ANFIS具有更强的自学习能力和自适应性[12-15]。
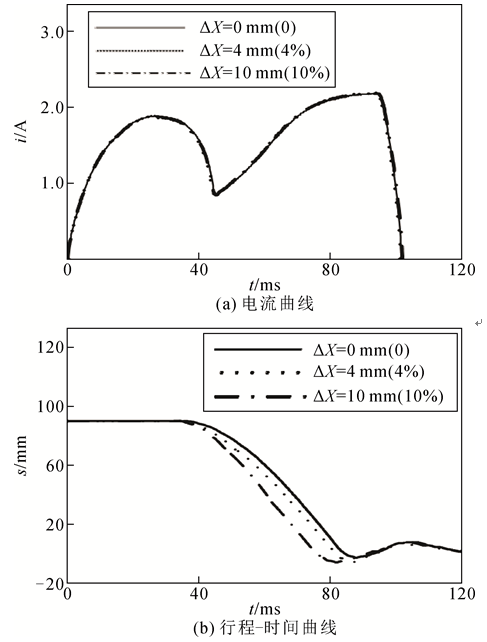 图9
储能弹簧力值变化时分闸特性曲线
Fig.9
Tripping characteristic curve under changing spring energy
图9
储能弹簧力值变化时分闸特性曲线
Fig.9
Tripping characteristic curve under changing spring energy
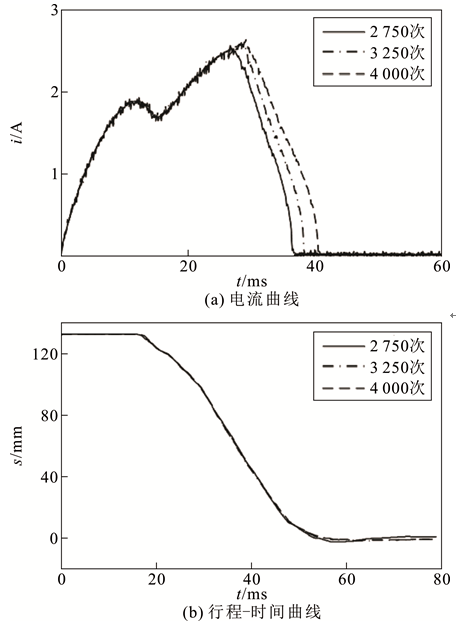 图10
126 kV断路器弹簧操作机构寿命试验分闸特性曲线
Fig.10
Tripping characteristic curve of 126 kV circuit breaker spring operating mechanism under life test
图10
126 kV断路器弹簧操作机构寿命试验分闸特性曲线
Fig.10
Tripping characteristic curve of 126 kV circuit breaker spring operating mechanism under life test
3.1.1 ANFIS的工作原理
以双输入单输出的ANFIS结构为例说明其工
作原理。ANFIS典型结构如
规则1
if
规则2
if
式中:
第1层:模糊化层,该层将输入变量模糊化,计算输入数据对模糊集合的隶属度,其输出表达
式为
式中:\({{\mu }_{{{\text{A}}_{i}}}}\)和\({{\mu }_{{{\text{B}}_{i-2}}}}\)为模糊集的隶属函数;
式中:
第2层:规则推理层,该层计算各条规则的激励强度,其输出表达式为
\({{O}_{2,i}}={{w}_{i}}={{\mu }_{{{\text{A}}_{i}}}}\left( {{x}_{1}} \right){{\mu }_{{{\text{B}}_{i}}}}\left( {{x}_{2}} \right),i=1,\ 2\) (6)
式中
第3层:归一化层,该层将各条规则的激励强度归一化,即计算第
\({{O}_{3,i}}={{\bar{w}}_{i}}=\frac{{{w}_{i}}}{\sum\limits_{i}{{{w}_{i}}}},\ \ i=1,\ 2\) (7)
式中\({{\bar{w}}_{i}}\)为第
第4层:逆模糊化层,该层计算每条规则的输出,其输出表达式为
\({{O}_{4,i}}={{\bar{w}}_{i}}{{y}_{i}}={{\bar{w}}_{i}}\left( {{p}_{i}}{{x}_{1}}+{{q}_{i}}{{x}_{2}}+{{r}_{i}} \right),\ i=1,\ 2\) (8)
 图11
252 kV断路器弹簧操作机构寿命试验分闸特性曲线
Fig.11
Tripping characteristic curve of 252 kV circuit breaker spring operating mechanism under life test
图11
252 kV断路器弹簧操作机构寿命试验分闸特性曲线
Fig.11
Tripping characteristic curve of 252 kV circuit breaker spring operating mechanism under life test
 图12
ANFIS典型结构
Fig.12
Typical structure of ANFIS
图12
ANFIS典型结构
Fig.12
Typical structure of ANFIS
式中:参数
第5层:输出层,该层计算所有逆模糊化节点输出的总和,并产生最后的ANFIS输出
\({{O}_{5}}=Y=\sum\limits_{i}{{{{\bar{w}}}_{i}}{{y}_{i}}}=\frac{\sum\limits_{i}{{{w}_{i}}{{y}_{i}}}}{\sum\limits_{i}{{{w}_{i}}}},\ \ \ \ i=1,2\) (9)
式中:
3.1.2 ANFIS的学习算法
本文通过梯度下降法和最小二乘法的混合学习算法来辨识系统的前件参数和后件参数,进而实现模糊模型的建立。对于混合算法,每个周期的学习过程都包含正向传递和反向传播2部分。
在正向学习过程中,固定前件参数,应用最小二乘法辨识后件参数。若有

令矩阵

则
\(Y={{\left[ \begin{matrix}{{Y}_{1}} {{Y}_{2}} \cdots {{Y}_{k}} & \cdots & {{Y}_{n}} \\\end{matrix} \right]}^{\text{T}}}=AS\) (13)
根据最小二乘法可以得到均方差最小意义下的后件参数向量的最佳估计\({{\mathbf{S}}^{*}}\)
\({{S}^{*}}={{\left( {{A}^{\text{T}}}A \right)}^{-1}}{{A}^{\text{T}}}Y\) (14)
在反向学习的过程中,对上一步骤计算得到的后件参数进行误差计算,采用前馈神经网络中的BP算法,将误差由输出端反向传到输入端,最后利用梯度下降法更新前件参数。
3.2 ANFIS评估模型的建立
利用分合闸线圈电流曲线和触头行程-时间曲线的特征参数作为ANFIS的输入,进而评估操作机构运行状态。但这些输入量可能隶属不同的范畴,如电流和速度,且它们不能用相似的模糊集合来区分。因此对于这些对象,如果采用单级的ANFIS结构,很难将这些因素考虑周全得到有意义的输出结果,同时由于输入变量的大量增多,模糊规则数量会急剧增加导致“维数灾难”[16-17]。因此,本文采用多级递阶ANFIS结构模型来评估操作机构的运行状态,其结构框图如
4 操作机构故障诊断实例
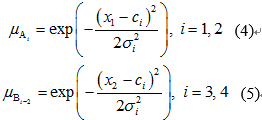
由于操作机构分合闸操作过程类似,绝大部分情况下,相同的故障对机构分合闸线圈电流和触头行程-时间曲线的影响趋势相同,且本模型对机构分合闸操作的诊断过程相同,因此本文以机构分闸操作故障诊断实例为例进行分析。本文对500 kV断路器液压操作机构进行测试,选取了“1—正常”、“2—分闸线圈电压降低”、“3—分闸线圈电压升高”、“4—分闸过程中操作机构本体卡涩”和“5—分闸弹簧储能增加”5种类型的操作机构状态训练样本各10组对ANFIS进行训练。训练样本数据如
利用
选取40组机构测试数据对评估系统进行测试,
 图13
多级递阶ANFIS结构
Fig.13
Multilevel hierarchical structure of ANFIS
图13
多级递阶ANFIS结构
Fig.13
Multilevel hierarchical structure of ANFIS
 图14
ANFIS评估流程
Fig.14
Assessment process of ANFIS
图14
ANFIS评估流程
Fig.14
Assessment process of ANFIS
 表1
分闸线圈电流和触头行程特征量训练样本数据
Table1
Coil current and contact travel characteristic data of training sample
表1
分闸线圈电流和触头行程特征量训练样本数据
Table1
Coil current and contact travel characteristic data of training sample
40组数据中包括的机构状态为:“1—正常”6组、“2—分闸线圈电压降低”5组、“3—分闸线圈电压升高”10组、“4—分闸过程中操作机构本体卡涩”10组及“5—分闸储能弹簧储能增加”9组。测试输出结果如
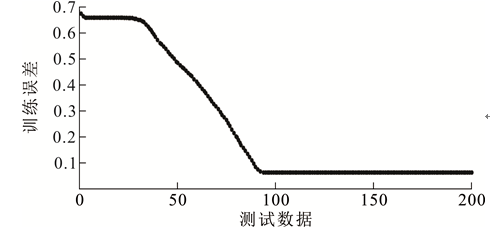 图15
ANFIS训练误差
Fig.15
Training error of ANFIS
图15
ANFIS训练误差
Fig.15
Training error of ANFIS
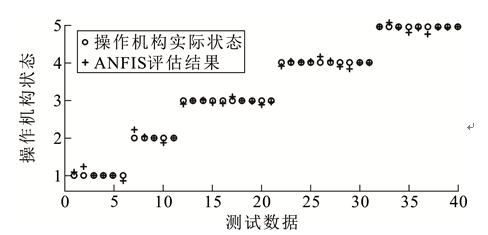 图16
ANFIS测试结果
Fig.16
Testing results of ANFIS
图16
ANFIS测试结果
Fig.16
Testing results of ANFIS
5 结论
1)分合闸线圈电流曲线和触头行程-时间曲线的变化与操作机构的运行状态密切相关。
2)试验分析参数变化、机构寿命对操作机构机械性能的影响,结果表明操作机构线圈电流曲线和触头行程时间-曲线相结合可以准确而较全面地反映机构的运行状况。
3)建立多级递阶ANFIS模型融合线圈电流曲线和触头行程-时间曲线来综合评估操作机构的运行状况,仿真结果表明本文所建立的多级递阶ANFIS模型能够有效地评估断路器操作机构的健康状况,对预测和防范故障、合理安排检修计划和检修重点具有重要的指导意义。
编辑 曾文君 何秋萍
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]