
杨林(1993),男,硕士研究生,主要研究方向为分布式发电及微网控制,E-mail:1083308857@qq.com;
0 引言
并网逆变器的输出滤波器是影响并网电流电能质量的关键环节,相较L型滤波器而言,LCL型滤波器具有更强的高频衰减能力及更低电感量,应用前景广阔。但LCL滤波器是三阶系统,存在谐振问题,容易发生振荡,甚至导致系统失稳,须采取措施加以抑制[1-4]。
LCL滤波器谐振抑制方法分为无源阻尼和有源阻尼[5]。无源阻尼方法是在滤波电感或者滤波电容上串联或者并联电阻,其中滤波电容串联电阻方法的损耗相对较小,工程上得到了广泛应用,然而,串联电阻会削弱LCL滤波器的高频衰减能力。滤波电容并联电阻的方法不影响LCL滤波器谐振频率以外频段的特性,是最理想的阻尼方法,但功率损耗过大,限制了它的应用。有源阻尼通过增加额外反馈通道来达到无源阻尼的谐振抑制效果,且不引入额外功率损耗,成为了近年的研究应用热点[6-9]。传统的基于电容电流比例反馈[10]、电容电压微分反馈[11]或者多状态变量组合反馈[12]等方法均须加装额外电流或者电压传感器,这不仅导致系统硬件成本增加,且降低了系统的可靠性。文献[13]提出基于并网电流反馈有源阻尼方法(grid current feedback active damping,GCFAD),通过并网电流微分组合反馈,得到和电容电流比例反馈类似的阻尼效果,但存在二阶微分信号提取困难,容易引入噪声等问题。文献[14]所提的GCFAD方法实现相对简单,但会对系统低频特性造成影响,且不可避免存在信号直接微分带来的问题。
自抗扰控制[15](active disturbance rejection control,ADRC)吸收了现代控制理论成果及PID“基于误差消除误差”的思想精髓,把作用于对象的不确定因素都归结为“未知扰动”,利用扩张状态观测器(extend state observer,ESO)对其进行估计并予以补偿,将控制对象校正为积分串联型,并通过灵活的状态误差反馈律,使系统获得优良的动稳态性能和抗扰能力。ADRC的“抗扰特性”使得它非常适用于非线性、强耦合的系统(如本文所述的LCL型逆变器)。传统非线性ADRC存在计算复杂、参数众多、调参困难等问题,文献[16]提出了线性自抗扰控制(linear active disturbance rejection control,LADRC)方法,该方法保留了自抗扰控制的优良性能,将诸参数设计归结为观测器带宽和控制器带宽的整定,算法简单,易于工程实现。LADRC已经在电厂、精密机械、加工机床、化工过程和现代武器系统等领域得到成功应用[17-18]。
目前,ADRC在电力系统换流器控制领域也取得了一定研究进展,文献[19]将LADRC引入到并联型有源滤波器的电流内环控制上,并通过李雅普诺夫稳定性理论证明了系统是渐进稳定的;文献[20]设计了基于ADRC的PWM整流器电压外环控制器,通过构造新型光滑非线性状态误差反馈函数,使得控制器收敛速度优于传统ADRC,并解决了控制力抖振的问题;文献[21]分析了PWM整流器模型预测直接功率控制和LADRC直接功率控制策略,LADRC的动态响应和模型参数鲁棒性优于前者;文献[22]研究了基于LADRC的微网运行模式平滑切换控制;文献[23-25]研究了ADRC在静止无功发生器直流电压控制、解耦控制中的应用。上述研究大多基于一阶ADRC,对系统某个控制环节进行简单替换,没有从控制对象具体的模型、阶数出发进行控制器设计。
本文首先建立LCL滤波器在dq旋转坐标系下的数学模型,将对象dq轴间耦合等视为扰动,根据模型阶数,设计基于三阶LADRC的并网电流控制器,提高并网逆变器的抗扰能力;基于传统的并网电流微分反馈有源阻尼策略,将扩张状态观测器得到的并网电流微分及二阶微分观测信号作为有源阻尼反馈量,在不引入额外电流传感器的情况下,实现和电容电流反馈有源阻尼类似的谐振抑制目标,避免传统方法直接求取电流微分带来的噪声等问题。通过频域分析法和仿真实验证明了上述策略的有效性。
1 LCL逆变器建模
LCL并网逆变器拓扑结构如
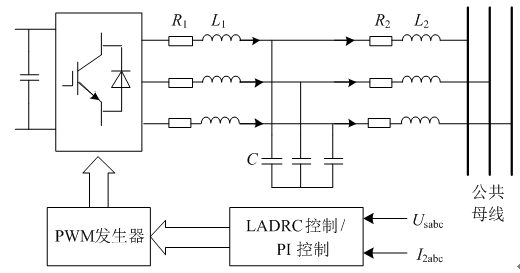 图1
LCL逆变器整体控制结构
Fig. 1
Overall control structure of LCL inverter
图1
LCL逆变器整体控制结构
Fig. 1
Overall control structure of LCL inverter
LCL并网逆变器在dq旋转坐标系下的数学模型为
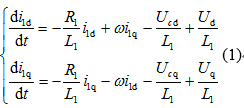
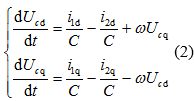
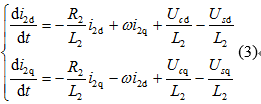
式中:
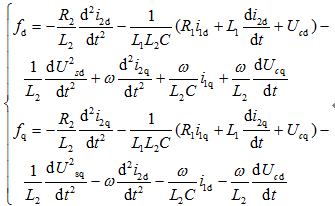
对式(3)求三阶微分,并将式(1)(2)代入,可得:
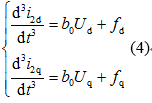
式中:
\({{b}_{0}}=1/({{L}_{1}}{{L}_{2}}C)\)
可见,在dq坐标系下,LCL逆变器是一个多变量、强耦合系统,采用一般的控制方法难以满足系统的控制要求。
2 三阶LADRC结构设计
2.1 整体结构
从式(4)可以看出,控制对象数学模型阶数为三阶,考虑对dq轴分别设计三阶LADRC控制器。当将dq轴间的耦合量视为扰动时,dq轴具有相同的LADRC控制结构,后面仅以d轴为例进行分析。
线性自抗扰控制器包括跟踪微分器(TD)、线性扩张状态观测器(LESO)、线性状态误差反馈律(LSEF)等结构,如
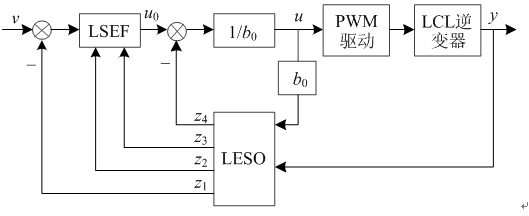 图2
自抗扰控制器的整体结构
Fig. 2
Control structure of ADRC
图2
自抗扰控制器的整体结构
Fig. 2
Control structure of ADRC
2.2 LESO设计
加入扩张状态,将式(4)中d轴微分方程写成如下状态空间形式。
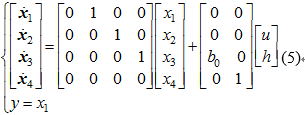
式中:
根据式(5),可建立如下四阶线性扩张状态观测器:
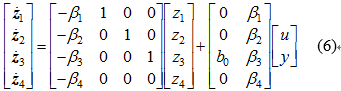
选取合适的观测器增益
2.3 状态误差反馈律设计
取总控制输出为
\(u=\frac{-{{z}_{4}}+{{u}_{0}}}{{{b}_{0}}}\) (7)
当忽略
\({{y}^{(3)}}=({{f}_{\text{d}}}-{{z}_{4}})+{{u}_{0}}\approx {{u}_{0}}\) (8)
控制器无需引入积分环节也能保证稳态性能,避免了积分环节对系统动态性能产生影响,这里设计比例反馈控制器。
\({{u}_{0}}={{k}_{\text{p}}}(v-{{z}_{1}})-{{k}_{\text{d}1}}{{z}_{2}}-{{k}_{\text{d}2}}{{z}_{3}}\) (9)
式中:
综上,式(6)(7)(9)构成系统的三阶线性自抗扰控制器。
根据文献[16]极点配置法,为实现系统对参考信号的快速无超调跟踪,可对扩张状态观测器和误差反馈律参数作如下配置:
\({{\beta }_{1}}\text{=}4{{\omega }_{\text{o}}},{{\beta }_{2}}\text{=}6{{\omega }_{\text{o}}}^{2},{{\beta }_{3}}\text{=4}{{\omega }_{\text{o}}}^{3},{{\beta }_{4}}\text{=}{{\omega }_{\text{o}}}^{4}\) (10)
\({{k}_{\text{p}}}\text{=}{{\omega }_{\text{c}}}^{3},{{k}_{\text{d}1}}\text{=3}\omega _{\text{c}}^{\text{2}},{{k}_{\text{d}2}}\text{=3}{{\omega }_{\text{c}}}\) (11)
式中:
3 三阶LADRC系统频带特性分析
3.1 LADRC抗总和扰动原理分析
ADRC的突出优点主要体现在其抗扰能力,本节将对LADRC控制系统的抗扰原理和参考信号跟踪特性予以分析。
联立式(6)(7)(9)(10)(11)可得:
\(u=\frac{{{R}_{\text{G}}}(s)}{{{b}_{0}}N(s)}v-\frac{{{R}_{\text{H}}}(s)}{{{b}_{0}}N(s)}y\) (12)
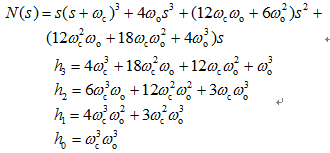
上式中,
\({{R}_{\text{G}}}(s)=\omega _{\text{c}}^{\text{3}}{{(s+{{\omega }_{\text{o}}})}^{4}}\) (13)
\({{R}_{\text{H}}}(s)={{\omega }_{\text{o}}}({{h}_{3}}{{s}^{3}}+{{h}_{2}}{{s}^{2}}+{{h}_{1}}s+{{h}_{0}})\) (14)
根据式(5),可将控制对象记为
\(y=\frac{1}{{{s}^{3}}}({{f}_{\text{d}}}+{{b}_{0}}u)\) (15)
结合式(12)(15),可将系统结构化为
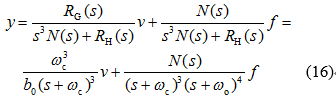
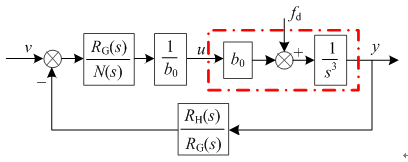 图3
LADRC系统简化结构图
Fig. 3
Simplified structure diagram of LADRC
图3
LADRC系统简化结构图
Fig. 3
Simplified structure diagram of LADRC
由式(16)可知,LADRC系统输出由跟踪项和扰动项组成,其中跟踪项只和误差反馈律参数(简化为控制器带宽
3.2 LADRC抗电网电压扰动分析
对于并网逆变系统而言,扰动主要来自于网侧电压,基于电网电压前馈策略可以有效抑制扰动对并网电流控制的影响,但同样存在微分信号求取困难的问题。下面分析LADRC观测器带宽和控制器带宽对系统跟踪特性和抗电网电压扰动特性的影响。如
\({{i}_{2\text{d}}}=\frac{\omega _{\text{c}}^{\text{3}}{{(s+{{\omega }_{\text{o}}})}^{4}}}{{{N}_{\text{p}}}(s)}{{i}_{2\text{dref}}}-\frac{{{b}_{0}}{{R}_{\text{f}}}(s)}{{{N}_{\text{p}}}(s)}{{U}_{\text{sd}}}\) (17)
式中:
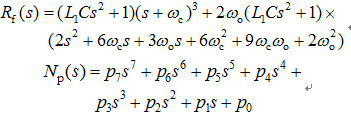
式中:
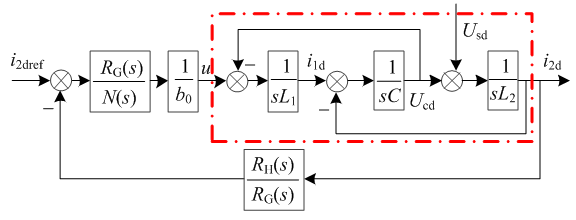 图4
LADRC逆变器系统结构图
Fig. 4
Structure diagram of LADRC based inverter
图4
LADRC逆变器系统结构图
Fig. 4
Structure diagram of LADRC based inverter
宽增加,且高频段特性不变,但
4 基于三阶LADRC的有源阻尼策略
4.1 传统LCL有源阻尼策略
传统的LCL滤波器有源阻尼谐振抑制策略中,基于电容电流比例反馈的有源阻尼策略效果最为理想,既能实现谐振抑制,又不影响其他频段的幅频特性。为节省传感器硬件成本,同时提高系统可靠性,可采用并网电流微分组合反馈策略来实现和前者等效的谐振阻尼抑制效果。假定并网逆变器处于单位功率因数运行状态,电网电压和并网电流比值表示为
\({{i}_{c\text{d}}}=({{L}_{2}}C{{s}^{2}}+{{R}_{L}}Cs){{i}_{\text{sd}}}\) (18)
由此可得GCFAD实现框图,如
4.2 基于三阶LADRC的有源阻尼策略
三阶LADRC电流控制模式下,并网电流的微分及二阶微分信号(
如
由上图可求得LADRC有源阻尼下并网电流闭
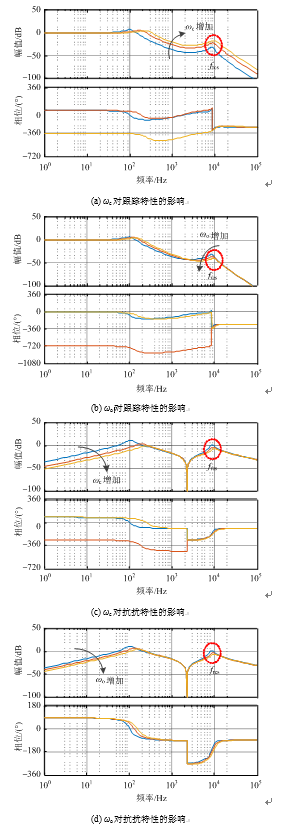 图5
LADRC闭环系统频带特性
Fig. 5
Frequency characteristics of LADRC
图5
LADRC闭环系统频带特性
Fig. 5
Frequency characteristics of LADRC
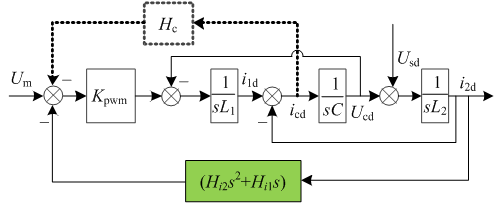 图6
传统有源阻尼结构图
Fig. 6
Structure of traditional active damping strategy
图6
传统有源阻尼结构图
Fig. 6
Structure of traditional active damping strategy
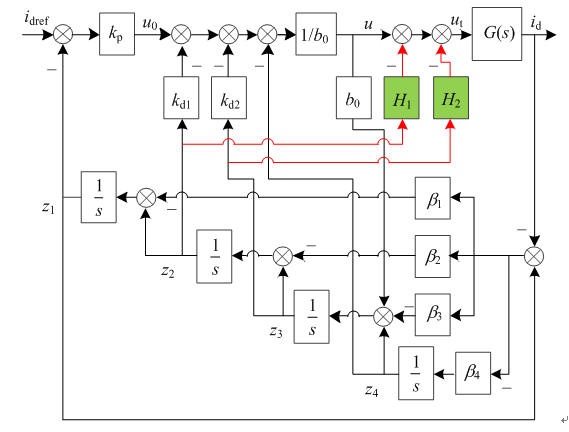 图7
基于LADRC状态反馈有源阻尼结构图
Fig. 7
Structure of LADRC with state feedback based active damping
图7
基于LADRC状态反馈有源阻尼结构图
Fig. 7
Structure of LADRC with state feedback based active damping
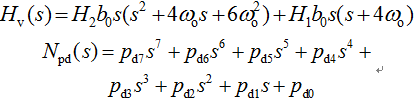
环传递函数为
\({{i}_{\text{2d}}}=\frac{\omega _{\text{c}}^{3}({{(s+{{\omega }_{\text{o}}})}^{4}}-{{H}_{\text{v}}}(s))}{{{N}_{\text{pd}}}(s)}{{i}_{\text{2dref}}}-\frac{{{R}_{\text{f}}}(s)}{{{N}_{\text{pd}}}(s)}{{U}_{\text{sd}}}\) (19)
式中:
如
5 仿真与实验
为了验证本文所提控制策略的有效性,基于PSCAD/EMTDC电磁暂态仿真软件,搭建了LCL并网逆变系统仿真模型,对基于LADRC并网电流控制有源阻尼及基于PI的电容电流反馈有源阻尼策略进行对比分析,系统参数见
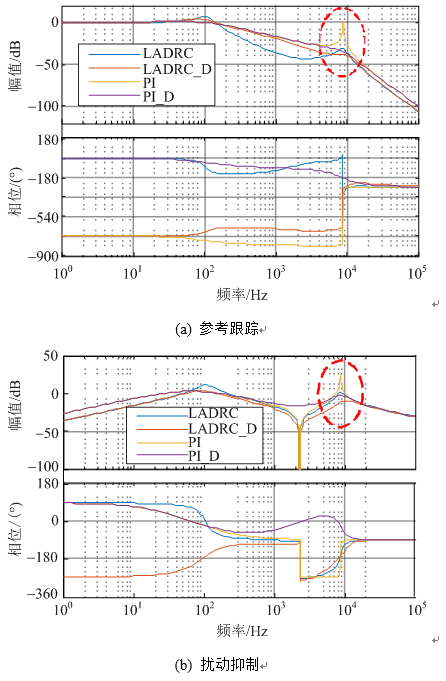 图8
LADRC、LADRC_D、PI和PI_D的频率特性对比
Fig. 8
Frequency characteristics of LADRC, LADRC_D、PI and PI_D
图8
LADRC、LADRC_D、PI和PI_D的频率特性对比
Fig. 8
Frequency characteristics of LADRC, LADRC_D、PI and PI_D
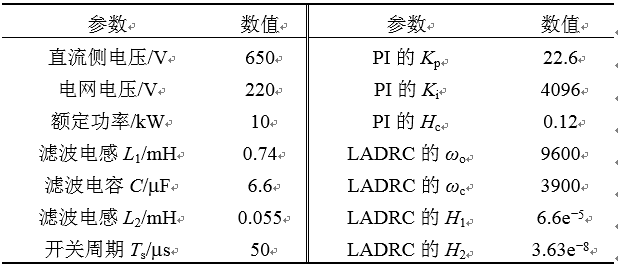 表1
LCL逆变器参数
Tab. 1
Parameters of LCL inverter
表1
LCL逆变器参数
Tab. 1
Parameters of LCL inverter
5.1 仿真结果
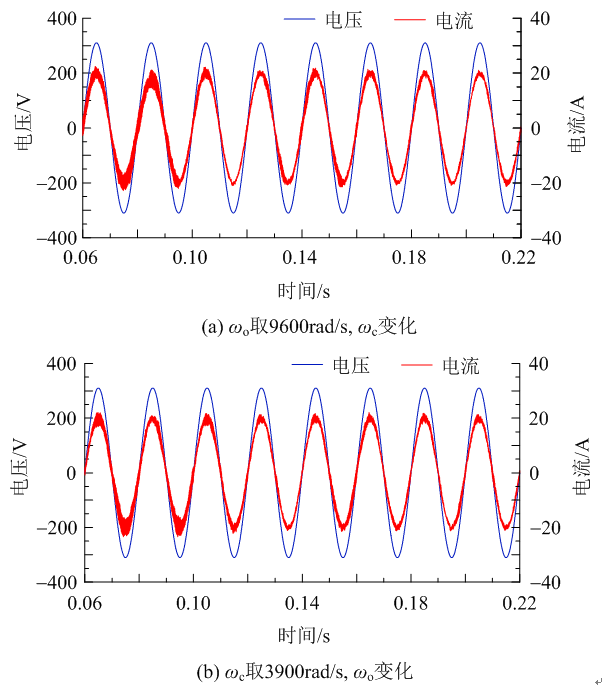 图9
图9
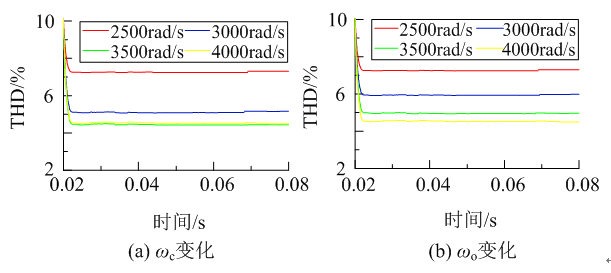 图10
图10
输出电流波形,
5.2 实验结果
为进一步验证本文所提LADRC控制策略的有效性,采用以DSP(TMS320F28335)为控制核心的三电平LCL并网逆变系统,如
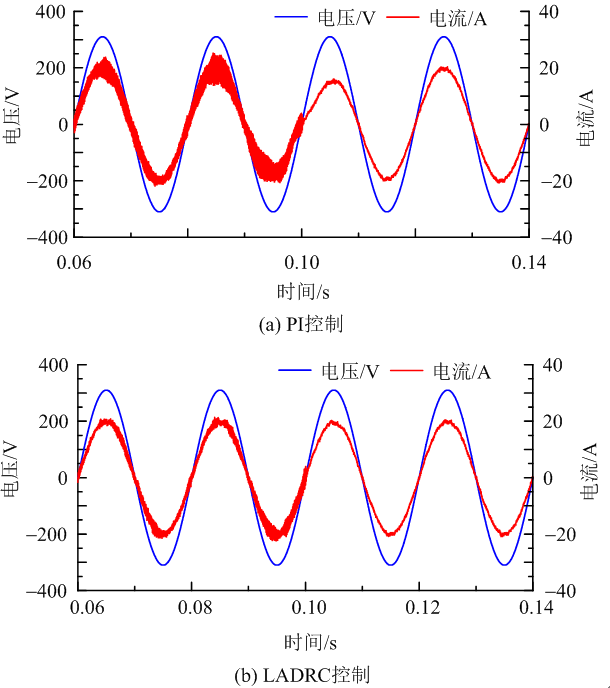 图11
LADRC与PI谐振抑制效果对比
Fig. 11
Resonance suppression of LADRC and PI
图11
LADRC与PI谐振抑制效果对比
Fig. 11
Resonance suppression of LADRC and PI
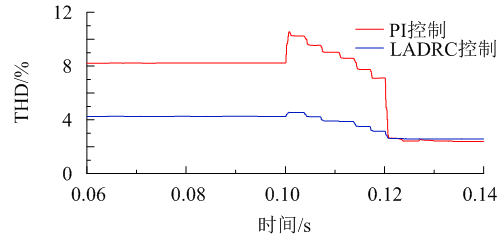 图12
投入阻尼前后LADRC与PI输出谐波畸变率
Fig. 12
Total harmonic distortion(THD)of LADRC and PI
图12
投入阻尼前后LADRC与PI输出谐波畸变率
Fig. 12
Total harmonic distortion(THD)of LADRC and PI
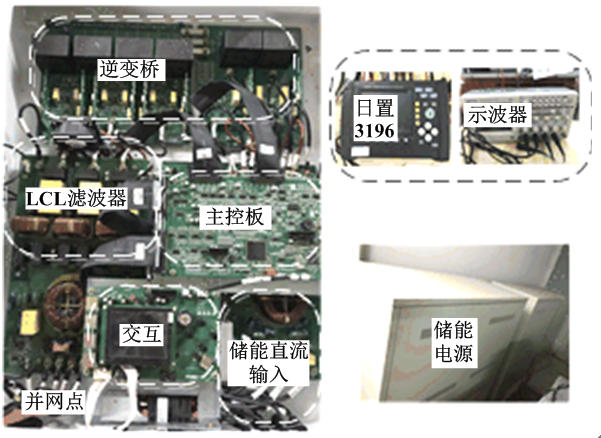 图13
三相LCL并网逆变器实物图
Fig. 13
Physical diagram of LCL grid connected inverter
图13
三相LCL并网逆变器实物图
Fig. 13
Physical diagram of LCL grid connected inverter
如
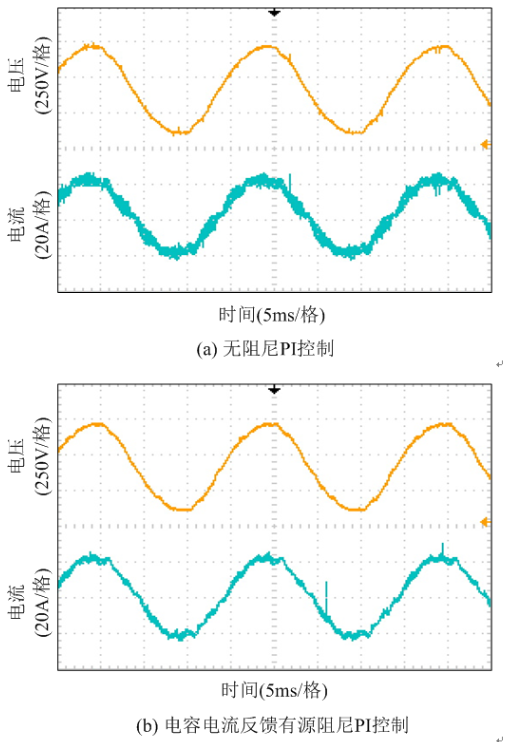 图14
PI控制谐振实验波形
Fig. 14
Resonance experiments of PI
图14
PI控制谐振实验波形
Fig. 14
Resonance experiments of PI
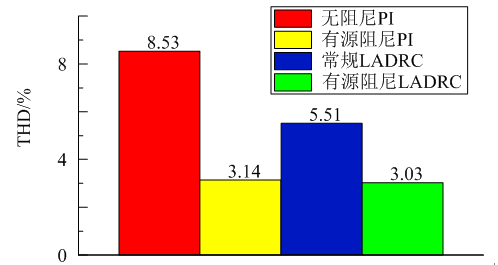 图15
不同阻尼下LADRC与PI输出谐波畸变率
Fig. 15
Total harmonic distortion(THD)of LADRC and PI
图15
不同阻尼下LADRC与PI输出谐波畸变率
Fig. 15
Total harmonic distortion(THD)of LADRC and PI
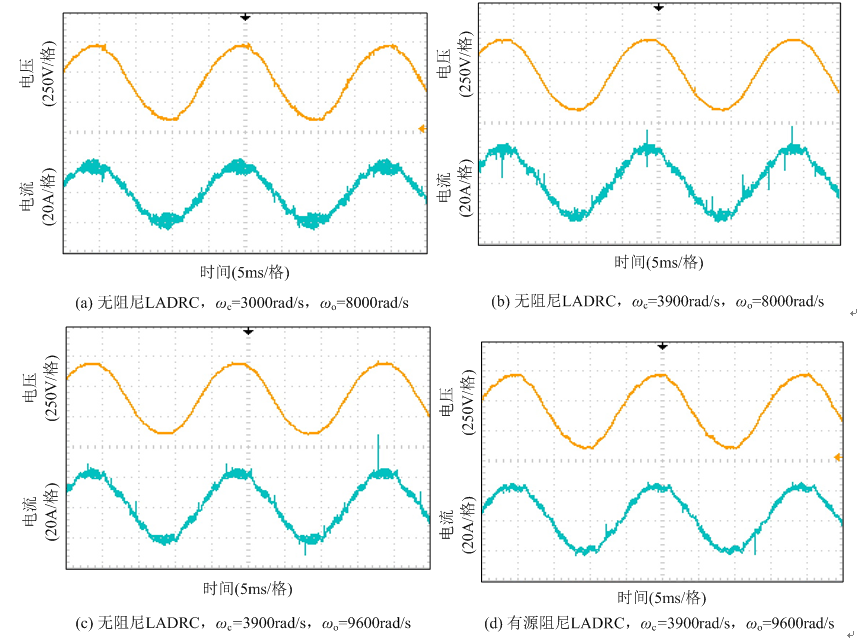 图16
LADRC谐振实验
Fig. 16
Resonance experiments of LADRC
图16
LADRC谐振实验
Fig. 16
Resonance experiments of LADRC
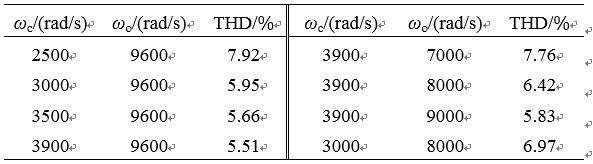 表2
不同
表2
不同
6 结论
LCL型并网逆变器存在谐振问题,传统的基于电容电流比例反馈有源阻尼策略可有效抑制谐振峰,但需要额外增加电流传感器,增加了系统硬件成本,降低了系统可靠性;而基于并网电流微分反馈有源阻尼在不增加额外硬件的情况下同样可以取得较好的阻尼效果,但存在微分信号提取困难的问题。本文提出了基于三阶线性自抗扰技术LADRC的并网电流及有源阻尼控制策略,通过对LADRC及PI闭环控制系统的频率特性进行对比分析可知,常规的LADRC本身具备一定的谐振抑制能力。基于传统的并网电流微分反馈有源阻尼策略,将扩张状态观测器得到的并网电流一阶微分及二阶微分观测信号作为有源阻尼反馈量,避免对电流直接求微分,在不引入额外电流传感器的情况下,实现了和电容电流反馈有源阻尼接近的谐振抑制目标。本文所提三阶LADRC算法较传统的PI调节器算法复杂度有所提高,参数设计存在一定困难。
(实习编辑 邵泽亮)
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]