
张传金(1986),男,博士,电力电子技术在电力系统中的应用,E-mail:chuanjin2359@163.com;
0 引言
三电平是目前中低压供电系统中最为常用的多电平变流器拓扑结构[1],相比于传统的两电平拓扑,三电平变流器具有输出波形谐波畸变率低、器件电压应力小和系统电磁干扰低等多方面的优点[2-4]。但是随着变流器电平数的增加功率器件数量也随之增加,使得变流器发生故障的概率显著增高。
变流器故障类型主要包括:直流母线支撑电容短路故障、功率器件短路故障、功率器件开路故障、逆变器桥臂开路及短路等[5]。其中,以功率器件的开路故障和短路故障最为多发和常见[6-7]。功率器件短路故障发生时会引起远大于额定电流的过电流,并且会对其他元器件产生破坏性的影响,在这种情况下必须采用停机的策略来保护系统中其他的元器件[8]。当功率器件发生开路故障,会在一定程度上影响了变流器的换流路径,增加其他功率器件的电压和电流压力;如不及时诊断并加以适当的容错控制,将诱发次生故障甚至导致系统瘫痪停机;如果控制得当系统可以继续维持运行[6,9]。目前已有的容错技术可分为软件型、硬件型2大类。硬件型容错控制策略主要通过在原变流器桥臂上加装双向晶闸管或者快速熔断器来实现对于故障相的隔离,然后利用电压重构或者增加冗余第四桥臂的方式来实现变流器的容错控制[10-12]。由于三电平变流器本身具备一定的冗余能力,通过电平数的降低可释放部分冗余资源,从而保证系统有限故障下具备持续运行的能力,因此软件型容错控制策略主要利用固有冗余开关状态实现开关级的容错控制。文
献[13]以NPC型三电平PWM整流器为研究对象提出了一种改变开关模式的容错控制方法,由于整流器工作在单位功率因数状态下该方法直接忽略了外功率器件故障的影响,此外该方法受到NPC型拓扑的结构限制无法完全消除电流畸变。文献[14]针对T型三电平变流器内功率器件开路故障提出了2种基于空间矢量容错控制策略,替换两电平开关模式容错控制(replacement two-level switching tolerance control。R2LS-TC)和维持三电平开关模式容错控制(maintenance three-level switching tolerance control,M3LS-TC)。文献[15]提出了一种单相两电平开关模式容错控制策略(one-phase two-level switching tolerance control,OP2LS-TC),始终保持故障相为两电平模式。
本文首先对功率器件开路故障状态下的三电平变流器的换流路径进行分析,然后对于2种典型三电平拓扑在故障状态下容错能力的做出对比分析,最后给出了一种适用于全功率因数范围的T型三电平变流器的容错控制策略。仿真和实验验证了所提算法的有效性。
1 功率器件开路故障分析
基于中点钳位(neutral point clamped,NPC)型和T型2种典型三电平拓扑结构的配电网静止无功补偿器(distribution static synchronous compensator,DSTATCOM)系统结构分别如
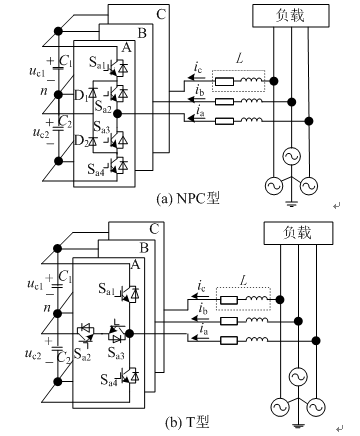 图1
三电平DSTATCOM系统结构图
Fig. 1
Structure diagram of three level DSTATCOM
图1
三电平DSTATCOM系统结构图
Fig. 1
Structure diagram of three level DSTATCOM
1.1 两类拓扑开关状态及换流路径
虽然在结构上存在一定的差异,但是在正常状态下2种拓扑结构的三电平DSTATCOM从控制算法到系统响应结果基本上完全一致。然而在功率器件开路故障状态下,NPC型和T字型三电平拓扑结构的DSTATCOM在运行状态上却存在一定的差异,由于在同一时刻很少存在2个以上的开关器件同时发生开路故障的情况,因此接下来对于电流路径的分析只考虑单只功率器件开路故障的情况。当功率器件发生开路故障时NPC型和T字型三电平变流器的电流路径分别如
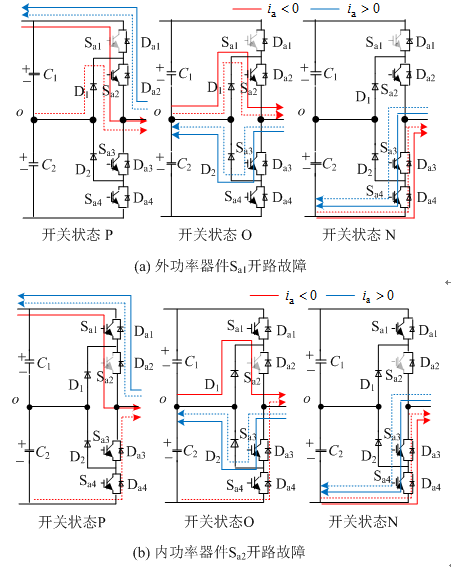 图2
功率器件开路故障下NPC型变流器电流路径
Fig. 2
Current path of NPC-type converter under switch open circuit fault
图2
功率器件开路故障下NPC型变流器电流路径
Fig. 2
Current path of NPC-type converter under switch open circuit fault
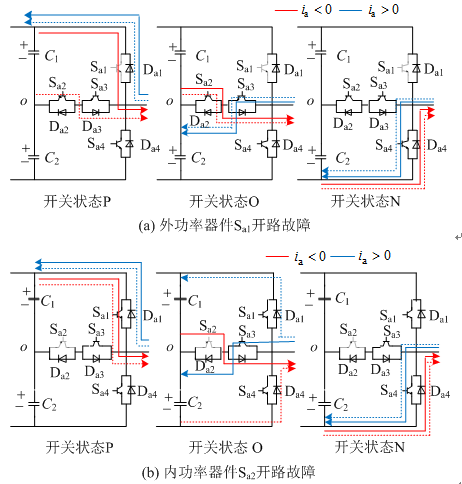 图3
功率器件开路故障下T型变流器电流路径
Fig. 3
Current path of T-type converter under switch open circuit fault
图3
功率器件开路故障下T型变流器电流路径
Fig. 3
Current path of T-type converter under switch open circuit fault
件Sa1和Sa2流向电网或者负载,此时交流侧端电压为+
对比
1.2 功率器件开路故障对系统的影响
由1.1节中对于功率器件开路故障时三电平变流器自身运行状态分析可知,交流电压的畸变不仅与开路故障位置有关还受到系统电流极性的影响。因此,有必要对运行于低功率因数的三电平DSTATCOM的开路故障状态进行进一步分析,无开路故障状态下DSTATCOM补偿无功功率的等效工作原理如
DSTATCOM的连接电抗器的等效电阻远小于电抗值,因此可以近似认为在DSTATCOM正常工
 图4
DSTATCOM系统工作原理图
Fig. 4
Schematic diagram of DSTATCOM
图4
DSTATCOM系统工作原理图
Fig. 4
Schematic diagram of DSTATCOM
作过程中参考电压
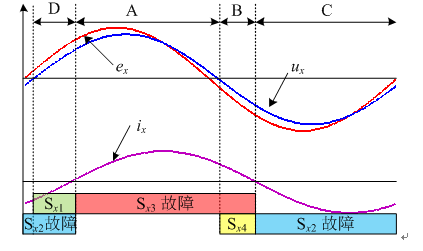 图5
T型三电平网侧变流器一般工况
Fig. 5
Operation state of T-type three level converter
图5
T型三电平网侧变流器一般工况
Fig. 5
Operation state of T-type three level converter
从
通过上面的对比分析可以发现,基于2种不同拓扑结构实现的三电平DSTATCOM虽然在工作原理上基本一致,但在很多实现细节上却存在差异:
1)NPC型拓扑需要额外的钳位二极管,会带来硬件成本的提升。
2)当交流端输出正电位或者负电位时NPC型拓扑的电流需要至少流经两只功率器件,而T型拓扑只流经一只功率器件,因此T型拓扑比NPC型具有更小的通态损耗。
3)当2类拓扑结构的变流器作为DTATCOM工作且发生内功率器件故障时,NPC型拓扑的电流波形比T型拓扑的受到的影响更为严重,因此T型拓扑比NPC型拓扑具有更好的容错控制基础。
2 T型拓扑功率器件开路故障容错控制
功率器件开路故障对于变流器的影响不仅取决于故障发生的位置还与系统的工况有关,当T型三电平DSTATCOM对电网进行无功(容性)补偿时,功率器件开路故障对于空间矢量分布的影响如
从
2.1 内功率器件开路故障容错控制
仍然以容性工况为例进行分析,当内功率器件Sa2发生开路故障时,由于电流路径受到影响空间矢量ONN、OON、OPN、OPO、OPP处于无效状态,因此扇区S1—S3的参考电压矢量的合成也将受到一定的影响。其中S1和S3扇区内只包含无效小矢量而S2扇区内既包含无效小矢量还包含无效中矢量,将S1和S2划分为4个小的区域如
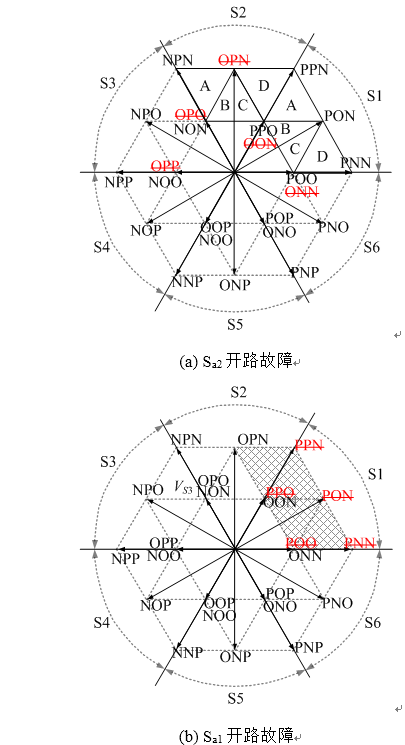 图6
功率器件开路故障状态下空间矢量分布图
Fig. 6
Space vector distribution in condition of switch open circuit fault
图6
功率器件开路故障状态下空间矢量分布图
Fig. 6
Space vector distribution in condition of switch open circuit fault
由于三电平空间矢量中的小矢量具有冗余特性且成对出现,而S1和S3扇区中每组冗余小矢量刚好只有一个受到功率器件故障影响后失效,因此可以采用冗余矢量替换的方法实现容错控制。
\(\left\{ \begin{align} {{T}_{a}}={{T}_{PON}}+{{T}_{PPN}}+{{T}_{PPO}} \\ {{T}_{b}}={{T}_{PPN}}+{{T}_{PPO}} \\ {{T}_{c}}={{T}_{PPO}} \\\end{align} \right.\) (1)
式中:
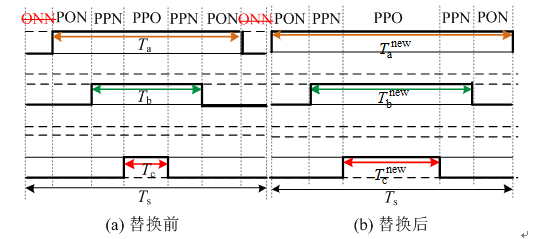 图7
区域S1-A内的矢量替换规则
Fig. 7
Vector replacement rule in the area of S1-A
图7
区域S1-A内的矢量替换规则
Fig. 7
Vector replacement rule in the area of S1-A
期。则S1-A区域内的失效的基本矢量OON可以采用具有相同模值和相位的空间矢量PPO代替,替换后的开关序列如
\(\left\{ \begin{matrix}{{T}_{offset}}=\min [{{T}_{a}},\ {{T}_{b}},\ {{T}_{c}}]\text{ } \\T_{x}^{\text{new}}={{T}_{x}}+{{T}_{offset}},x=\text{a,b,c} \\\end{matrix} \right.\) (2)
当参考矢量位于S1-B和S1-D区域内时,所对应的开关序列分别为OON→PON→POO→PPO和ONN→PNN→PON→POO,与S1-A区域类似每组开关序列中只含有一个无效小矢量,因此直接采用冗余矢量进行替换和式(2)实现容错控制。但当参考矢量位于S1-B区域时,开关序列中存在2个无效矢量ONN和OON,如
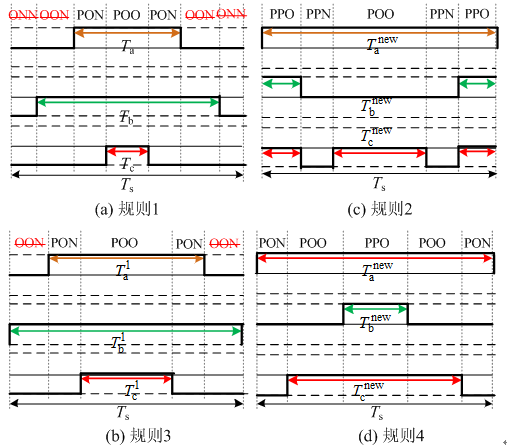 图8
区域S1-B内的矢量替换规则
Fig. 8
Vector replacement rule in the area of S1-B
图8
区域S1-B内的矢量替换规则
Fig. 8
Vector replacement rule in the area of S1-B
其中ONN可以直接利用正组矢量POO进行替换并通过式(2)计算新的作用时间[
\(\left\{ \begin{matrix}\begin{align} {{T}_{x1}}={{T}_{x}}+\min [{{T}_{a}},\ {{T}_{b}},\ {{T}_{c}}]\text{ } \\ {{T}_{offset}}={{T}_{s}}-{{T}_{\text{a}1}} \\\end{align} \\T_{x}^{\text{new}}={{T}_{x1}}+{{T}_{offset}},x=\text{a,b,c} \\\end{matrix} \right.\) (3)
但是如果按照
2次开通关断的情况,这无疑增加了功率器件开关损耗。因此,为了减小不必要的损耗需要对
\(\left\{ \begin{matrix}{{T}_{offset}}=\min [{{T}_{a}},\ {{T}_{b}},\ {{T}_{c}}]\text{ } \\T_{x}^{\text{new}}={{T}_{x}}-{{T}_{offset}},x=\text{a,b,c} \\\end{matrix} \right.\) (4)
\(\left\{ \begin{matrix}\begin{align} {{T}_{x1}}={{T}_{x}}-\min [{{T}_{a}},\ {{T}_{b}},\ {{T}_{c}}]\text{ } \\ {{T}_{offset}}={{T}_{a1}} \\\end{align} \\T_{x}^{\text{new}}={{T}_{x1}}-{{T}_{offset}},x=\text{a,b,c} \\\end{matrix} \right.\) (5)
当参考矢量位于S2扇区内时,该扇区受到Sa2开路影响失效的空间矢量不仅包含小矢量OPO和OON,还有中矢量OPN,而中矢量并不像小矢量那样有可替换的冗余矢量,其在矢量平面内具有唯一性。传统的容错控制在该区内直接将三电平模式转换为两电平模式进行控制,即合成参考电压矢量时仅仅使用NPN、PPN、PPP(NNN)4个基本矢量来解决中矢量失效的问题。然而S2扇区内除去无效的中矢量OPN外仍然存在2个有效的小矢量NON和PPO,因此可以利用S2扇区内剩余全部未受到故障影响的有效空间矢量对无效矢量进行替换,
以保证在该扇区内开关状态尽可能地保留三电平模式。
仍然将S2扇区划分为4个小的区域进行讨论,当参考电压矢量处于S2-A区域内时,矢量OPN和OPO无效,其中OPN可以被替换为NPN和PPN的组合形式,而OPO则直接被替换为PPO,该区域内矢量替换前后参考矢量合成的开关序列如
\(\left\{ \begin{matrix}{{T}_{offset}}=-\frac{1}{2}{{T}_{a}}\text{ } \\T_{a}^{\text{new}}={{T}_{a}}+{{T}_{offset}} \\\end{matrix} \right.\) (6)
当参考矢量位于S2-B、S2-C、S2-D三个区域内,采用类似的矢量替换法则进行容错控制。由于
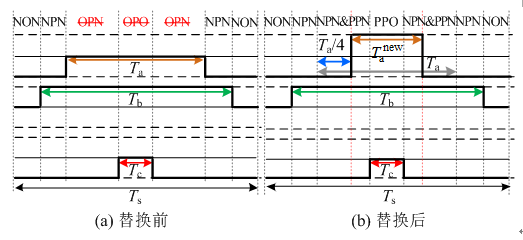 图9
区域S2-A内的矢量替换规则
Fig. 9
Vector replacement rule in the area of S2-A
图9
区域S2-A内的矢量替换规则
Fig. 9
Vector replacement rule in the area of S2-A
BC两相在替换前后输出电压始终保持不变,因此这里只给出A相的开关序列,如
\(\left\{ \begin{matrix}{{T}_{offset}}=\frac{1}{2}{{T}_{s}}-\frac{1}{2}{{T}_{a}} \\T_{a}^{\text{new}}={{T}_{a}}+{{T}_{offset}} \\\end{matrix} \right.\) (7)
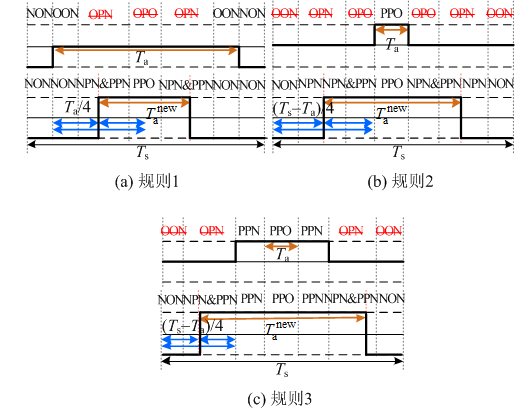 图10
区域S2-B、S2-C、S2-D内的矢量替换规则
Fig. 10
Vector replacement rule in the area of S2-B, S2-C and S2-D
图10
区域S2-B、S2-C、S2-D内的矢量替换规则
Fig. 10
Vector replacement rule in the area of S2-B, S2-C and S2-D
2.2 外功率器件开路故障容错控制
为合理利用系统设计容量并减小相同工况下变流器交流侧输出端电压的畸变率,三电平DSTATCOM通常工作在高调制度区域如
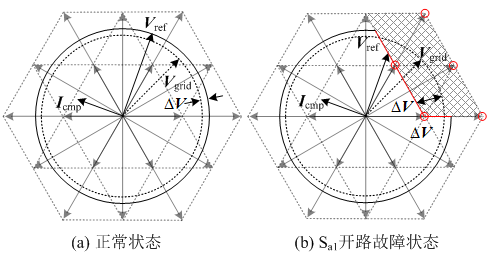 图11
三电平DSTATCOM系统运行矢量状态图
Fig. 11
Vector diagram of three level DSTATCOM system operating state
图11
三电平DSTATCOM系统运行矢量状态图
Fig. 11
Vector diagram of three level DSTATCOM system operating state
\(\begin{align} u_{dc}^{*}=\bmod ({{\mathbf{V}}_{grid}}-\omega L\mathbf{I}_{cmp}^{*}\cdot {{\text{e}}^{-\text{j}}}-R\mathbf{I}_{cmp}^{*})= \\ \ \ \ \ \ \sqrt{6}\sqrt{U_{x}^{2}+{{(\omega LI_{x}^{*})}^{2}}\pm 2\omega LI_{x}^{*}{{U}_{x}}+{{(RI_{x}^{*})}^{2}}}\ \approx \\ \ \ \ \ \sqrt{6}({{U}_{x}}\pm \omega LI_{x}^{*}) \\\end{align}\) (8)
式中:mod(•)为矢量模值函数;
感值;
流的有效值。由于跟电网动态需求补偿系统可能工作在容性或者感性工况下,因此式(8)中计算直流母线参考值时分为正负2种情况。当直流母线电压到达新的给定值之后参考电压矢量轨迹进入矢量平面的非故障区域,可以采用之前给出的矢量替换的方法进行容错控制。
MO3LS-TC的算法流程如附录
2.3 与传统容错控制策略对比分析
以往对于T型三电平变流器功率器件开路故障的容错控制研究,主要针对其作为变频调速装置或者PWM整流器等高功率因数的情况,在这种工况下由于桥臂输出正电位时电流几乎都是由交流侧流向直流侧的,S
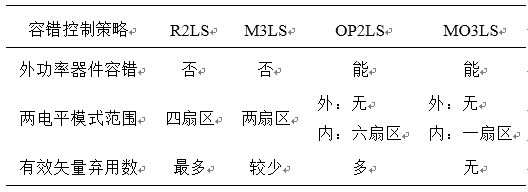 表1
不同容错控制策略性能对比
Tab. 1
Comparison of different fault tolerance control strategies
表1
不同容错控制策略性能对比
Tab. 1
Comparison of different fault tolerance control strategies
3 仿真分析
在Matlab/Simulink中搭建具有T型拓扑结构的三电平DSTATCOM模型,主要仿真参数如下:直流母线电压340 V,电抗器0.4 mH,交流电压190 V,开关频率5 kHz。仿真验证波形如附录
3.1 内功率器件故障
附录
3.2 外功率器件故障
附录
附录
谱分布上却存在差异:OP2LS得到的线电压的谐波主要分布在开关频率附近;MO3LS得到的线电压的谐波主要分布在二倍的开关频率附近。这使得相同连接电抗器的情况下,对于后者的电压谐波的滤除效果更好,因此附录
4 实验验证
为验证本文所提的容错方案应用于实际系统的可行性,研制了T型三电平DSTATCOM实验样机。功率器件使用塞米控的SKiM601TML三电平功模块,控制板由数字信号处理器(digitalsignal processor,DSP)+复杂可编程逻辑器件(complexprogrammable logic device,CPLD)的方式实现,实验参数与仿真中的系统参数保持一致。实验中在CPLD中脉冲分配时采用封锁并置低PWM信号的方法来模拟三电平DSTATCOM装置中相应的功率器件开路故障,无功补偿控制算法以及开路故障容错控制策略则在DSP中完成。
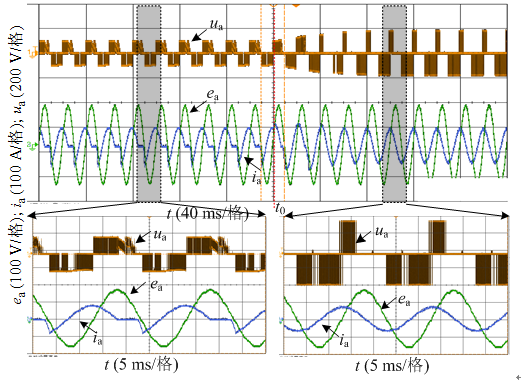 图12
Sa1开路故障时容错控制实验波形
Fig. 12
Experimental waveforms of fault tolerant control for Sa1 open circuit fault
图12
Sa1开路故障时容错控制实验波形
Fig. 12
Experimental waveforms of fault tolerant control for Sa1 open circuit fault
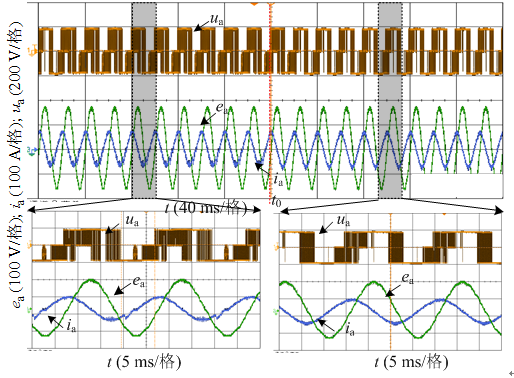 图13
Sa2开路故障时容错控制实验波形
Fig. 13
Experimental waveforms of fault tolerant control for Sa2 open circuit fault
图13
Sa2开路故障时容错控制实验波形
Fig. 13
Experimental waveforms of fault tolerant control for Sa2 open circuit fault
5 结论
本文对基于NPC型和T型2种常用三电平拓扑的DSTATCOM在功率器件开路故障时电流路径和系统运行状态进行了深入、系统地对比分析,在此基础之上提出了一种适用于T型三电平DSTATCOM功率器件开路故障的容错控制策略,其关键结论是:1)三电平变流器的功率器件开路故障可以被分为外功率器件开路故障、内功率器件开路故障;功率器件发生开路故障时NPC型拓扑受到的影响比T型拓扑要更大,因此T型三电平变流器比NPC型具有更好的容错控制基础。2)功率器件开路故障对于变流系统的影响,不仅与故障发生的位置有关,还与系统的运行工况即功率因数有关,而且随着功率因数的增加故障影响范围逐渐变小。3)所提MO3LS容错控制策略既可以解决内功率器件开路故障,也能解决外功率器件开路故障,而且适用于全功率因数范围内功率器件开路故障的容错控制。仿真和实验结果表明该容错控制策略针对功率器件开路故障能够为T型三电平DSTATCOM提供一种可靠的容错控制方案。
附录
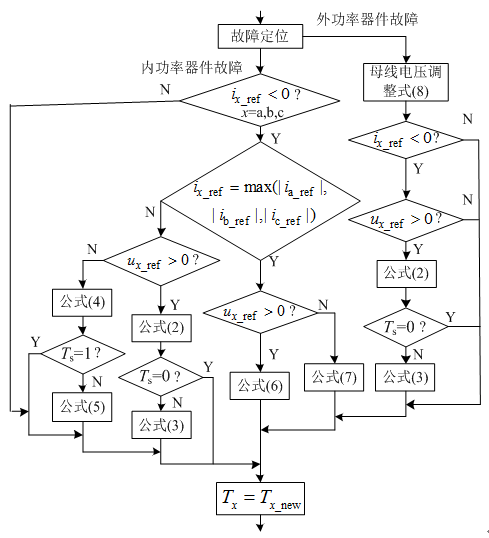 图1
容错控制策略算法流程图
Fig. 1
Algorithm flow of fault tolerant control
图1
容错控制策略算法流程图
Fig. 1
Algorithm flow of fault tolerant control
 图2
Sa2开路故障时容错控制仿真波形
Fig. 2
Simulation waveforms of fault tolerant control for Sa2 open circuit fault
图2
Sa2开路故障时容错控制仿真波形
Fig. 2
Simulation waveforms of fault tolerant control for Sa2 open circuit fault
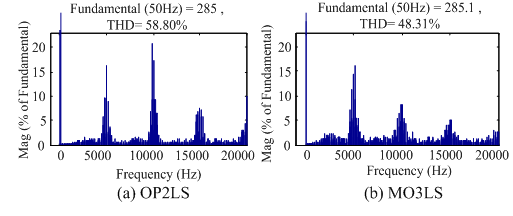 图3
Sa2开路故障时线电压频谱
Fig. 3
Line voltage spectrum during Sa2 open circuit fault
图3
Sa2开路故障时线电压频谱
Fig. 3
Line voltage spectrum during Sa2 open circuit fault
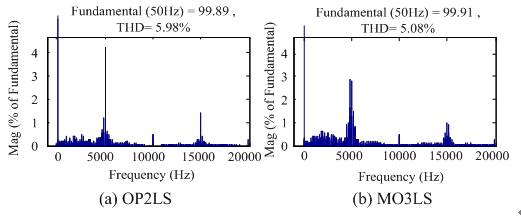 图4
Sa2开路故障时电流频谱
Fig. 4
Current spectrum during Sa2 open circuit fault
图4
Sa2开路故障时电流频谱
Fig. 4
Current spectrum during Sa2 open circuit fault
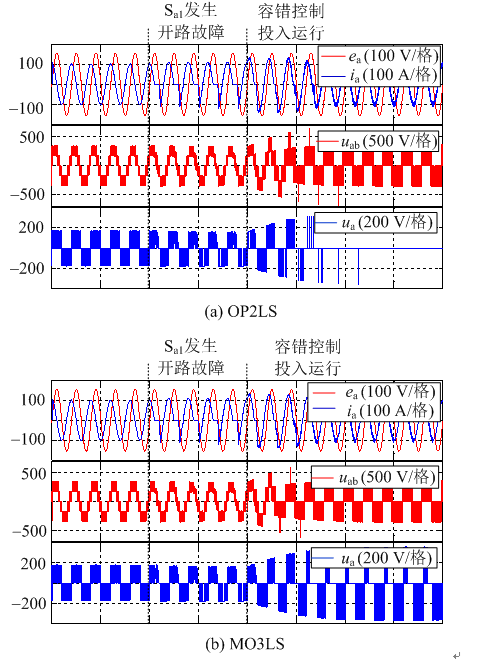 图5
Sa1开路故障时容错控制仿真波形
Fig. 5
Simulation waveforms of fault tolerant control for Sa1 open circuit fault
图5
Sa1开路故障时容错控制仿真波形
Fig. 5
Simulation waveforms of fault tolerant control for Sa1 open circuit fault
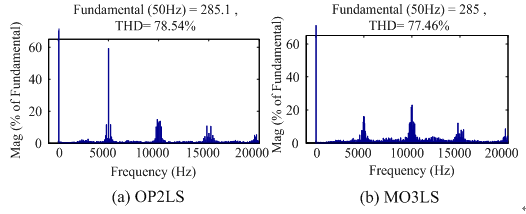 图6
Sa1开路故障时线电压频谱
Fig. 6
Line voltage spectrum during Sa1 open circuit fault
图6
Sa1开路故障时线电压频谱
Fig. 6
Line voltage spectrum during Sa1 open circuit fault
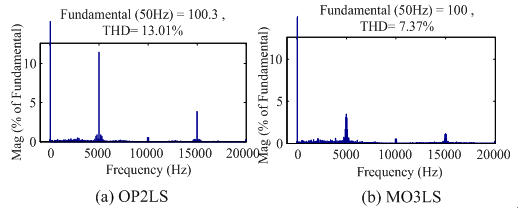 图7
Sa1开路故障时电流频谱
Fig. 7
Current spectrum during Sa1 open circuit fault
图7
Sa1开路故障时电流频谱
Fig. 7
Current spectrum during Sa1 open circuit fault
附录见本刊网络版(http://www.dwjs.com.cn/CN/volumn/current.shtml)。
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]